V2X 仿真¶
V2X 简介¶
V2X(Vehicle-to-Everything),即车联网,是指车辆与基础设施、其他车辆、行人等交通参与者之间进行信息交互和通信的技术,其中 “V” 代表车辆,而 “X” 则代表与其他交通参与者的任何类型的通信。
技术目的
V2X 技术的目的是提高交通运行的效率和安全性,通过实时信息交互和协调来减少车祸、缓解交通拥堵和降低污染等问题。
技术分类
这项技术通常基于无线通信技术和互联网技术,包括车辆到车辆(V2V)、车辆到基础设施(V2I)、车辆到行人(V2P)和车辆到网络(V2N)等不同类型的通信。
单车智能¶
工作原理
单车智能工作原理包括传感器探测与定位、计算决策以及控制执行。
传感器探测与定位:单车智能通过车上安装的传感器完成对周围环境的探测和定位功能。
计算决策:传感器数据被分析处理,实现对目标的识别,并进行行为预测和全局路径规划、局部路径规划和即时动作规划,决定车辆当前及未来的运行轨迹。
控制执行:控制执行主要包括车辆的运动控制及人机交互,决定每个执行器如电机、油门、刹车等控制信号。
现状
按照美国国际自动机工程师学会(SAE)划分的 L0-L5 自动驾驶等级来看,
AD 先进辅助驾驶系统功能(Advanced Driver Assistance System, ADAS)仍然是主力。
L2 正处在商业化落地发展阶段,但市场渗透率和应用规模仍然较小。
L3、L4 及以上等级自动驾驶仍处在试验和区域性示范为主,规模商业化落地则需要更长的时间。
自动驾驶等级划分
美国国际自动机工程师学会(SAE)划分的 L0-L5 自动驾驶等级如下:
L0(无自动化):车辆没有自动化系统,完全由人类驾驶。
L1(驾驶员协助):车辆装备了某些基本的自动化系统,例如巡航控制、自动制动等,但是需要驾驶员持续监控和控制。
L2(部分自动化):车辆装备了更多的自动化系统,例如车道保持、自动变道等,可以在一定程度上协助驾驶员进行控制,但是驾驶员仍需持续监控和控制车辆。
L3(有条件自动化):车辆可在一定条件下完全自主驾驶,但是在其他条件下需要驾驶员接管控制。
L4(高度自动化):车辆可在大部分场景下完全自主驾驶,但是在某些特殊情况下需要驾驶员介入。
L5(完全自动化):车辆可在任何道路和天气条件下完全自主驾驶,无需驾驶员介入。
局限性
单车智能发展面临这一些局限性,其安全依然面临着巨大挑战、长尾问题限制了车辆可运行设计域、需要车辆安装多种高昂的传感器其经济性问题还未得到充分解决。
车路协同¶
车路协同(Vehicle Infrastructure Integration,V2I)通过信息交互协同、协同感知和协同决策控制极大程度上拓展单车的感知范围、提升感知能力,通过 RSU 和路测 MEC 将道路智能化,从根本上解决单车智能自动驾驶的技术瓶颈。通过车载单元和路测单元的结合提供给单车更多冗余信息,保证驾驶安全。
发展过程¶
车路协同自动驾驶是一个由低至高的发展过程,主要包括三个阶段:
信息交互协同:车辆 OBU 与路侧 RSU 进行直连通信,实现车辆与道路的信息交互与共享。
协同感知:路测传感器和车载传感器信息的共享。
协同决策控制:利用车侧和路测的感知信息和通过路测决策部分实现对整个道路车辆以及其他基础设施的控制,提高交通运行效率和安全性。
备注
车路协同和单车智能自动驾驶不是两个独立的部分,他们相辅相成共同完成自动驾驶车辆的上路。
从组成上来看,车路协同包括单车智能的车辆和智能的道路。
智能道路需要:
路测传感器(毫米波雷达、摄像头、激光雷达等)
路侧通信单元(路侧单元 RSU、蜂窝基站)
路测边缘计算设施(多接入边缘计算 MEC、云平台)
路测实时动态 RTK(全球导航卫星系统 GNSS 校正)
路测标牌、信号灯以及其控制单元
因此,为了实现自动驾驶由自主式控制向协同式控制跃迁、提升行驶安全性,发展基于 V2X 的车联网的浪潮方兴未艾。
V2X 标准¶
车路协同自动驾驶的方案的施行需要国家的标准、新基建、法律法规的支持,它是智能汽车和智慧道路结合的产物。自动驾驶的不同阶段各国家组织部门有着不同的标准支持与法律法规支持。
就国内而言车路协同标准包括以下:
T/CSAE 53-2017《合作式智能运输系统 车用通信系统应用层及应用数据交互准》
T/CSAE 53-2020《合作式智能运输系统 车用通信系统应用层及应用数据交互准》
T/CSAE 157-2020《合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第二阶段)》
T/CSAE 158-2020《基于车路协同的高等级自动驾驶数据交互内容》
T/CSAE 156-2020《自主代客泊车系统总体技术要求》
YD-T 3707-2020《基于LTE的车联网无线通信技术 网络层技术要求》
YD-T 3755-2020《基于LTE的车联网无线通信技术支持直连通信的路侧设备技术要求》
YD-T 3710-2020《基于LTE的车联网无线通信技术 消息层测试方法》、《智能网联汽车测试场设计技术要求》
中华人民共和国工业和信息化部 《基于LTE的车联网无线通信技术 安全证书管理系统技术要求》
V2X 发展历程¶
从 2018 年的 V2X “三跨” 跨通信模组、跨终端、跨整车的互联互通应用展示开始,到 2019 年“跨芯片模组、跨终端、跨整车、跨安全平台”的 C-V2X “四跨” 互联互通应用示范活动的举办,先导示范活动让更多人感受到了 C-V2X 的魅力。
而 “新四跨” 在 “三跨” “四跨” 的基础上,根据技术和产业发展需求,进一步深化 C-V2X 相关技术和标准的测试和验证,增加高精度地图和高精度定位,并结合国产密码算法,车端与路侧广播位置相关信息采用先偏转后加密的形式,探索 C-V2X 所面临的地图和定位法规问题的技术解决方案。同时,还采用全新数字证书格式,增加了云控平台、V2X 信息演示与位置态势演示平台等新元素。
应用层标准介绍¶
应用层标准《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》定义了合作式智能交通系统车用通信系统基础应用及基本要求,定义了应用层数据集字典、数据交换标准及接口规范。
基于 LTE 的车联网直接通信系统是通过人、车、路的信息交互,实现车辆和基础设施之间、车辆与车辆、车辆与人之间的智能协同与配合的一种通信系统。车载通信系统实现了智能运输系统的不同子系统之间的信息交互。通过与交通系统中各个参与元素的直接通信,车载通信系统可以为包括提升道路安全、高的交通通行效率和提供各种信息服务的应用提供有效信息支持。
下图给出了车辆-路侧单元(V2I)直接通信系统架构,对于路侧单元设备而言,其通常包括了以下几个子系统:
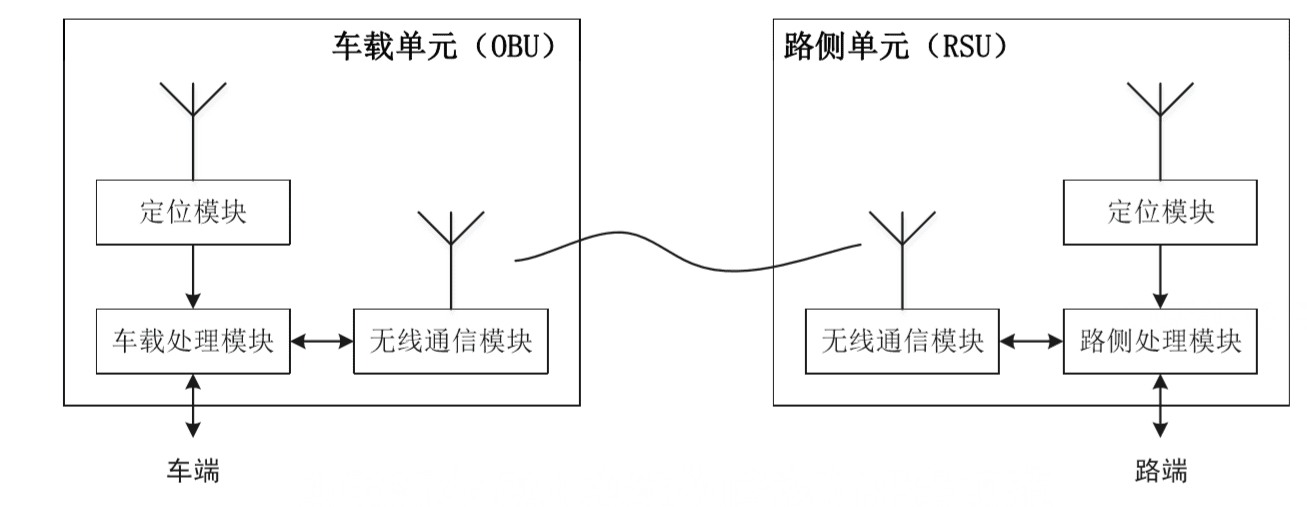
通过上图可以看出在真实的 V2X 运行过程中至少需要车载单元(OBU)和路测单元 RSU 的参与。对 V2X 的仿真也就是对 OBU 和 RSU 的通信过程、通信数据的仿真。每个模块又包括通信子模块、车载处理模块、定位模块。
V2X 仿真总体介绍¶
SimOne V2X 仿真结合其自身的优势,利用 WorldEditor 编辑和还原 Opendrive 格式的城市道路信息,利用 SCENARIO Editor 和交通流仿真软件在路网信息的基础上生成车辆、行人、信号灯等动态信息,提供丰富的路测和车载传感器资源,这些资源都是 V2X 要收发的数据信息必要组成。
应用场景¶
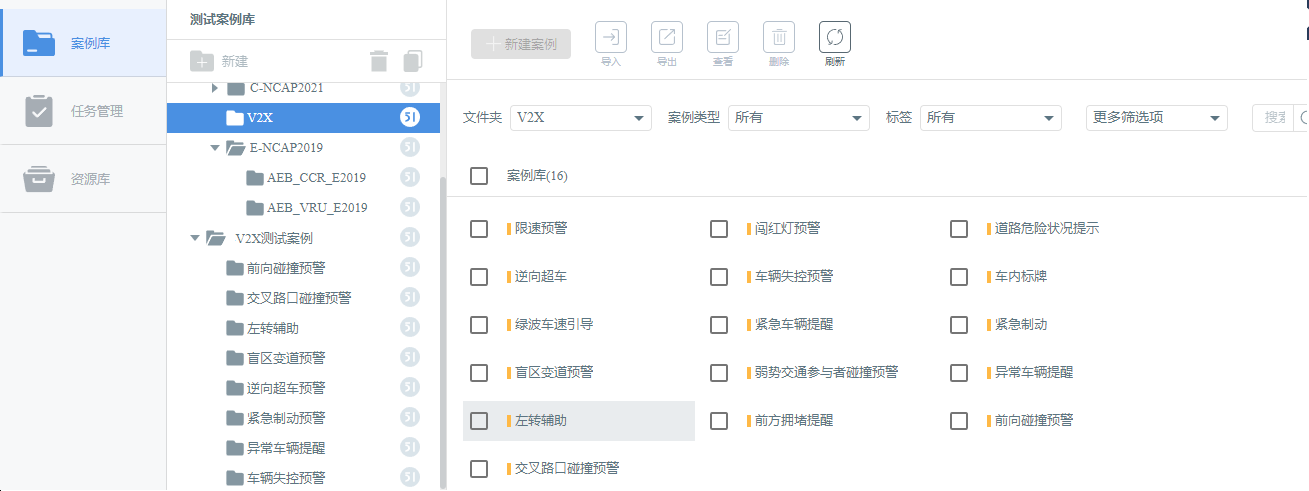
51-SimOne 在应用层上根据 CSAE 标准《合作式智能运输系统 车用通信系统应用层及应用数据交互标准(2017,2020)》开发,提供除近场支付以外的其他 16 个应用场景,提供便捷的案例自定义编辑功能。
下图为 SimOne 支持的 V2X 案例:
应用消息¶
在应用层消息方面提供基本的 DataElement 数据元素、DataFrame 数据结构 和 Message 通信消息,包括 BSM(Basic Safety Message)车辆状态消息、RSI (Roadside Safety Information) 车路协同安全消息、RSM (Roadside Monitoring) 路测安全信息、SPAT(Signal Phase and Timing) 信号灯信息以及 MAP 地图信息。
下图展示了一个 SimOne V2X 场景:
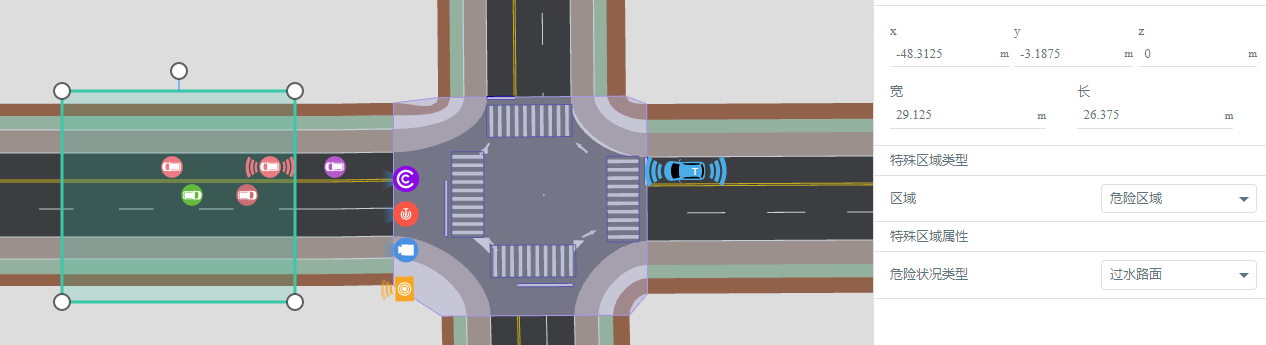
BSM(Basic Safety Message)车辆状态消息:对于场景中的每辆车、行人可设置其 OBU 的开关状态,用于产生基本安全消息(BSM)。
RSI (Roadside Safety Information) 车路协同安全消息:根据 SimOne 场景案例编辑功能,编辑特殊状态及特殊区域触发器,结合 HDMap API 获取的道路标牌、限速信息生成路测消息(RSI)。
RSM (Roadside Monitoring) 路测安全信息:配置路测毫米波雷达、激光雷达、摄像头、融合传感器与路测 RSU 以及各传感器之间的连接关系,根据路测传感器的感知信息生成路测安全消息(RSM)。
SPAT(Signal Phase and Timing) 信号灯信息:根据信号灯的预配置时序生成信号灯相位消息(SPAT)。
MAP 地图信息:根据 opendrive 地图及其提供的 HDMap API 接口生成地图消息(MAP)。
标准案例仿真¶
提供车辆的标准案例仿真,综合考虑车辆所在环境的车辆、建筑、天气状况,支持输出基于 4G/5G 网络的仿真的数据传输率情况,通过 API 接口访问原生的 ASN.1 编码的 V2X 二进制数据。
测试模式¶
自动驾驶算法研发整个过程,需要经历不同阶段的不同测试过程,其中仿真测试具体包含软件在环(SIL)、硬件在环(HIL)、车辆在环(VIL)几个大步骤。某些阶段还需要V2X在环仿真测试,驾驶模拟器仿真等仿真工具的介入。
软件在环 - SIL(Software-in-the-Loop Testing):基于SimOne仿真软件的软件在环测试,在需求分析概念阶段,实现算法开发与验证优化。开发者在ADAS/AD算法开发初期及建模阶段,进行充分的仿真测试方式,为后续工作提供技术验证。
硬件在环 - HIL(Hardware-in-the-Loop Testing):基于SimOne仿真软件,输出多种感知信号给真实域控制器平台,同时结合毫米波雷达目标模拟器,多通道视频注入系统,仿真模拟产生雷达射频信号、视频流信号,对域控制器软硬件系统进行充分测试,验证硬件平台以及内部感知与规控算法是否满足测试要求。本方案是自动驾驶产品研发测试阶段不可缺少的安全高效的测试手段。
V2X设备在环 - HIL:针对V2X应用算法测试需求,SimOne虚拟仿真软件和射频通信的联合仿真技术,提供完整的端到端V2X应用场景的HIL测试系统。本方案支持在实验室环境下,完成应用场景仿真和通信环境仿真测试,可以极大的加速V2X研发验证过程。
整车在环 - VIL(Vehicle-in-the-Loop Testing):包含实验台VIL和测试场VIL两种类型,是车辆量产前重要的测试手段。通过对实车注入虚拟仿真场景,进行各种常规场景以及危险场景测试,减少对场地、真实交通和试验车辆的需求,降低实车测试的难度和风险,提高测试效率,降低测试成本。