传感器dump虚拟标注数据集¶
Part 1 概览¶
在 51WORLD 虚拟标注数据集中,主要包含由 SimOne 所产生的摄像头传感器相关数据和激光雷达传感器相关数据。
摄像头传感器相关数据主要包括图像和对应的语义分割、实例分割、深度标注、目标检测标注;
激光雷达传感器相关数据主要包括激光点云和对 3Dbboxes 标注、语义分割标注、实例分割标注。
51WORLD 虚拟标注数据集内容丰富且全面,可满足用户对于图像目标检测、点云目标检测、融合目标检测、光流、实例分割、语义分割和深度预测等算法研究的需求。
为了帮助用户快速了解和使用 51WORLD 虚拟标注数据集,
以下将分为五个章节介绍 51WORLD 虚拟标注数据集的使用方法。
第 2 节将介绍 51WORLD 虚拟标注数据集的坐标系定义和各个坐标系的对应关系;
第 3 节将介绍数据集的一些参数配置和标注文件;
第 4 节将介绍数据集的目录结构;
第 5 节将介绍该数据集同步;
第 6 节为附录,将介绍数据集的物理材质定义、用户工具和深度学习示例。
Part 2 数据集坐标系定义¶
其中所有坐标系都为右手笛卡尔坐标系,旋转顺序为内旋 ZYX(Yaw, Pitch, Roll)。主车坐标系、激光雷达坐标系和世界坐标系为 X 朝前、Y 朝左、Z 朝上,摄像头坐标系为 X 朝右、Y 朝下、Z 朝前。坐标系示意图如下。
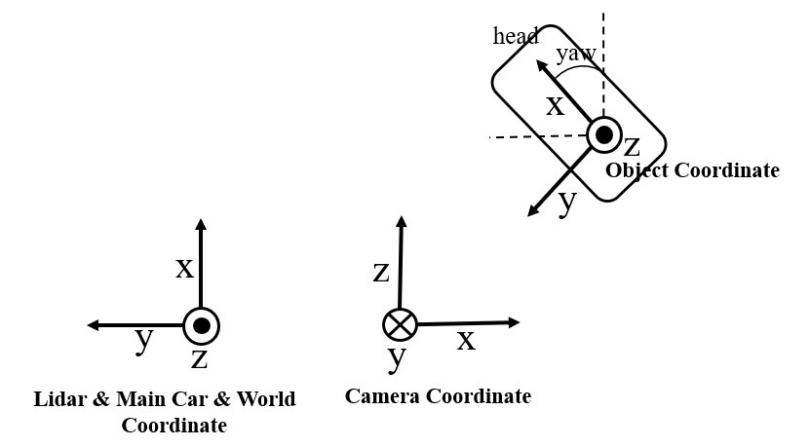
图 2-1 坐标系示意图
Lidar坐标系和Camera坐标系的原点都位于主车的车顶,且位置重合;主车坐标系的原点位于主车后轴中心对应的地面。示意图如下:
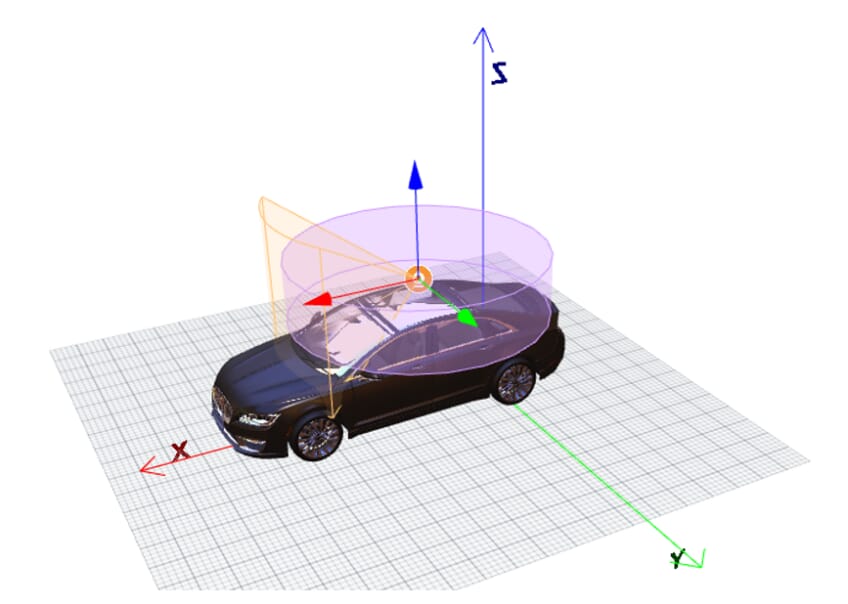
图 2-2 坐标系位置图
Part 3 数据集参数及标注文件说明¶
3.1 数据集采集参数说明¶
在每份虚拟数据集采集的时候都会保存一份数据集的参数设置在 DumpSettings.json 中,保存在传感器 Dump 设置的目录下:Dump 文件夹中。其中包含天气及环境参数、相机内外参及特性参数、激光雷达的内外参和采集时间等信息。数据集采集参数描述如下表:
表 3-1 DumpSettings.json 的参数说明

3.2 摄像头目标标注文件说明¶
摄像头目标标注文件存放在摄像头设置时:Dump 文件夹中 CameraInfo.json,这些文件保存了摄像头的位置信息和目标二维、三维的标注信息。摄像头目标标注文件的描述如下:
表 3-2 每一帧记录参数信息表
参考字段 |
单位 |
描述 |
|---|---|---|
pos |
m |
摄像头在世界坐标系(x、y、z)的坐标 |
rot |
rad |
摄像头在世界坐标系的旋转坐标 |
vel |
m/s |
摄像头在世界坐标系中的速度 |
localACC |
m/s^2 |
主车坐标系下的IMU加速度信息 |
localAngVel |
rad/s |
主车坐标系下的IMU角速度信息 |
bboxes |
小于遮挡比例所有目标的2d包围框集合 |
|
bboxesCulled |
大于遮挡比例的所有目标的2d包围框集合 |
|
bboxes3D |
所有目标的3d包围框集合 |
表 3-3 bboxes和bboxesCulled单个目标参数信息表
参考字段 |
单位 |
描述 |
|---|---|---|
id |
目标的ID |
|
type |
目标的类型 |
|
bbox |
pixel |
目标在图像坐标系的坐标(左上x和y, 右下x和y) |
obbox |
pixel |
目标在图像系中的方向坐标(中心坐标、长、宽、方向) |
pixelRate |
比例,范围0-1 |
未被遮挡的像素的面积/模型整体的BBOX矩形面积 |
rectRate |
比例,范围0-1 |
未被遮挡的像素的最小包围矩形的面积/模型整体的BBOX矩形面积 |
表 3-4 bboxes3D单个目标参数信息表
参考字段 |
单位 |
描述 |
|---|---|---|
id |
目标的ID |
|
type |
目标的类型 |
|
pos |
m |
目标在世界坐标系所处的坐标 |
rot |
rad |
目标在世界坐标系的旋转坐标 |
size |
m |
目标的在世界坐标系中的长、宽、高 |
vel |
m/s |
目标在世界坐标系中的加速度 |
localAcc |
m/s^2 |
目标在主车坐标系下的IMU加速度信息 |
localAngVel |
rad/s |
目标在主车坐标系下的IMU角速度信息 |
relativePos |
M |
目标相对于摄像头坐标系的坐标 |
relativeRot |
Rad |
目标相对于摄像头坐标系的旋转坐标 |
3.3 激光雷达目标标注文件说明¶
激光雷达目标标注文件存放在激光雷达设置时:Dump 文件夹中 LidarInfo.json,这些文件保存了激光雷达的位姿信息和三维的标注信息。激光雷达目标标注文件的描述如下:
表 3-5 每一帧记录参数信息表
参考字段 |
单位 |
描述 |
|---|---|---|
pos |
m |
激光雷达在世界坐标系(x、y、z)的坐标 |
rot |
rad |
激光雷达在世界坐标系的旋转坐标 |
vel |
m/s |
激光雷达在世界坐标系中的速度 |
localAcc |
m/s^2 |
主车坐标系下的IMU加速度信息 |
localAngVel |
rad/s |
主车坐标系下的IMU角速度信息 |
bboxes3D |
所有目标的3d包围框集合 |
表 3-6 bboxes3D单个目标参数信息表
参考字段 |
单位 |
描述 |
|---|---|---|
id |
目标的ID |
|
type |
目标的语义类型 |
|
pos |
m |
目标在世界坐标系所处的坐标 |
rot |
rad |
目标在世界坐标系的旋转坐标 |
size |
m |
目标的在世界坐标系中的长、宽、高 |
vel |
m/s |
目标在世界坐标系中的加速度 |
localAcc |
m/s^2 |
目标在主车坐标系下的IMU加速度信息 |
localAngVel |
rad/s |
目标在主车坐标系下的IMU角速度信息 |
relativePos |
m |
目标相对于激光雷达坐标系的坐标 |
relativeRot |
rad |
目标相对于激光雷达坐标系的旋转坐标 |
3.4 毫米波雷达目标标注文件说明¶
毫米波雷达 dump 文件存放在 web 界面配置路径下:Dump 文件夹中 RadarInfo.json,这些文件保存了毫米波雷达的安装位置,安装角度信息,以及识别目标物信息,dump 文件中的具体描述如下:
表 3-7 每一帧记录参数信息表
参考字段 |
单位 |
描述 |
|---|---|---|
pos |
m |
毫米波雷达在世界坐标系(x、y、z)的坐标 |
rot |
rad |
毫米波雷达在世界坐标系的旋转坐标 |
表 3-8 bboxes3D 单个目标参数信息表
参考字段 |
单位 |
描述 |
|---|---|---|
id |
目标的ID |
|
subId |
目标物子ID,同一个目标物如果有多个点,其subId不一样 |
|
type |
目标物类型 |
|
pos |
m |
目标物位置(x,y,Z) |
vel |
m/s |
目标物绝对速度(x,y,Z) |
range |
m |
目标物相对距离 |
angle |
0-2Π |
目标物角度(目标物与主车方向夹角) |
snr |
dB |
目标物信噪比 |
rangerate |
m/s |
目标在主车方向上,相对主车的速度 |
rsc |
目标物雷达截面积 |
|
probality |
0-1 |
目标物置信度 |
Part 4 数据集参数及标注文件说明¶
51WORLD 虚拟标注数据集中包含种类相当丰富的数据,可满足用户对于图像目标检测、点云目标检测、融合目标检测、光流、实例分割、语义分割和深度预测等算法研究的需求。数据集的总体目录结构如下,用户也可以根据自己的需求去下载相应的数据集。
SimOne
|--- train
|--- scene1
|---image_label
|---pcd_label
|---pcd_bin
|---image
|---image_segmentation
|---depth
|---image_instance
|---flow_panoptic
|---video
|---DumpSettings.json
|--- scene2
...
|--- test
|---scene1
|---pcd_bin
|---image
|---video
|---DumpSettings.json
|--- scene2
...
各级目录和文件的解释如下:
表 4-1 文件夹与文件描述
文件名 文件夹名 |
描述 |
|---|---|
scene |
用于记录数据发布的时间或者包含场景信息 |
image_label |
存放图像目标标注文件 |
pcd_label |
存放点云目标标注标签 |
pcd_bin |
存放点云二进制数据,包含点云的x, y, z, intensity信息 |
image |
存放仿真的图像数据 |
Image_segmentation |
存放图像语义分割数据,像素值1-31分别代表一种类别 |
depth |
存放深度图 |
image_instance |
存放图像实例分割图,每种颜色代表一类 |
flow_panoptic |
存放全景分割的图像,以颜色区分类别 |
video |
存放视频及标签,标签通过将时间戳与视频帧进行对应 |
DumpSettings.json |
存放数据集下载时的一些参数配置,如相机的内外参等 |
Part 5 数据集同步¶
传感器数据集采用离线同步的方式。当传感器采用相同帧率或倍数帧率输出数据集时,所有传感器的输出会严格时间同步。在51WORLD虚拟标注数据集中,每个类型的数据都是完全同步的,精确到每一辆车的位置和朝向、每一个行人的姿态和动作。同样利用SimOne的传感器数据集同步机制,摄像头和激光雷达数据也可以做到完全同步,这点可以从前面的激光雷达仿真效果展示可以看到。基于完全同步的摄像头和激光雷达数据集,我们可以更方便的做感知融合算法的测试和训练。
Part 6 附录¶
6.1 用户工具¶
为方便用户使用数据集,我们提供了两个工具,分别是数据加载工具和 kitti 转化工具。详见 user_tools 文件夹。
6.2 物理材质¶
本数据集标注了动静态障碍物、建筑物和环境信息等31个物理材质。物理材质及其对应的编号,颜色如下表:
表 6-1 51WORLD 数据集物理材质
type |
物理材质 |
资源 |
RGB |
|---|---|---|---|
1 |
Foliage |
树、灌木、相对较高的花 |
107,142,35 |
2 |
Building |
各类建筑物 |
70,70,70 |
3 |
Road |
行车道 |
128,64,128 |
4 |
Pedestrian |
行人,行人身上的小物品:如手机、背包和手提箱 |
220,20,60 |
5 |
Pole |
交通牌或交通灯的杆子、带杆子的路灯、其他地面管状杆子 |
153,153,153 |
6 |
Car |
小汽车 |
0,0,142 |
7 |
Static |
未分类的静态物体:如路边公交站台、电话亭等 |
0,0,0 |
8 |
Bicycle |
路上的动态自行车 |
119,11,32 |
9 |
Fence |
栅栏、建筑物围栏 |
190,153,153 |
10 |
Sky |
天空 |
70,130,180 |
11 |
SideWalk |
人行道 |
244,35,232 |
12 |
RoadMark |
车道线 |
240,240,240 |
13 |
TrafficSign |
交通牌、指示牌 |
220,220,0 |
14 |
Wall |
围墙 |
102,102,156 |
15 |
TrafficLight |
交通灯 |
250,170,30 |
16 |
Terrain |
草地、沙地、泥地、路边花坛地、花坛中矮小的花 |
152,251,152 |
17 |
Rider |
自行车上的人、摩托车上的人 |
255,0,0 |
18 |
Truck |
卡车、搅拌车、箱式货车 |
0,0,70 |
19 |
Bus |
客车、大巴车 |
0,60,100 |
20 |
SpecialVehicle |
特殊车辆:警车、救护车、消防车、火车,轻轨等 |
0,80,100 |
21 |
Motorcycle |
摩托车、电瓶车 |
0,0,230 |
22 |
Dynamic |
未分类的动态物体,比如小动物,也可用来标记可移动物体, 如路边的临时桌椅,行人的手提箱、婴儿车 |
111,74,0 |
23 |
GuardRail |
交通栏杆 |
180,165,180 |
24 |
Ground |
其他平地,水面 |
81,0,81 |
25 |
Bridge |
桥梁、高架桥、天桥 |
150,100,100 |
26 |
SpeedLimitSign |
限速牌 |
220,220,0 |
27 |
StaticBicycle |
路边的静态自行车 |
169,11,32 |
28 |
Parking |
停车场、路边停车区域 |
250,170,160 |
29 |
RoadObstacle |
路上的静态障碍物:交通锥、水马、雪糕筒、隔离栏等 |
230,150,140 |
30 |
Tunnel |
隧道 |
150,120,90 |
31 |
TrashCan |
垃圾桶 |
151,124,0 |
6.3 下载地址¶
百度网盘链接:https://pan.baidu.com/s/1FDeb3mcY8J79A6o6IydKOQ
提取码:5151
6.4 算法示例¶
本数据提供了三个简单的算法示例,分别是图像目标检测算法、激光雷达目标检测算法和融合目标检测算法。其中目标检测算法为一个非官方实现的 YOLOv2 算法,激光雷达目标检测算法为非官方实现的 PIXOR 算法,融合目标检测算法为 mmdetection3d 框架中的 MVX-NET 算法。用户可根据自己的需求,选择算法示例进行开发和优化,提出自己的创新点。详见:
融合目标检测算法及激光雷达目标检测算法(mmdetection3d): https://github.com/JaHorL/mmdet3d-51WORLDDataset