DIL多车互动¶
注意
本教程目前仅适用于【SimOne -企业版】
1. 如何构建一个多车互动案例¶
注意
多车互动案例模块的功能为高级功能,需单独付费开通。
新建一个多车互动案例的步骤如下。
1.1 配置主车¶
新建一辆用于多车互动的主车。

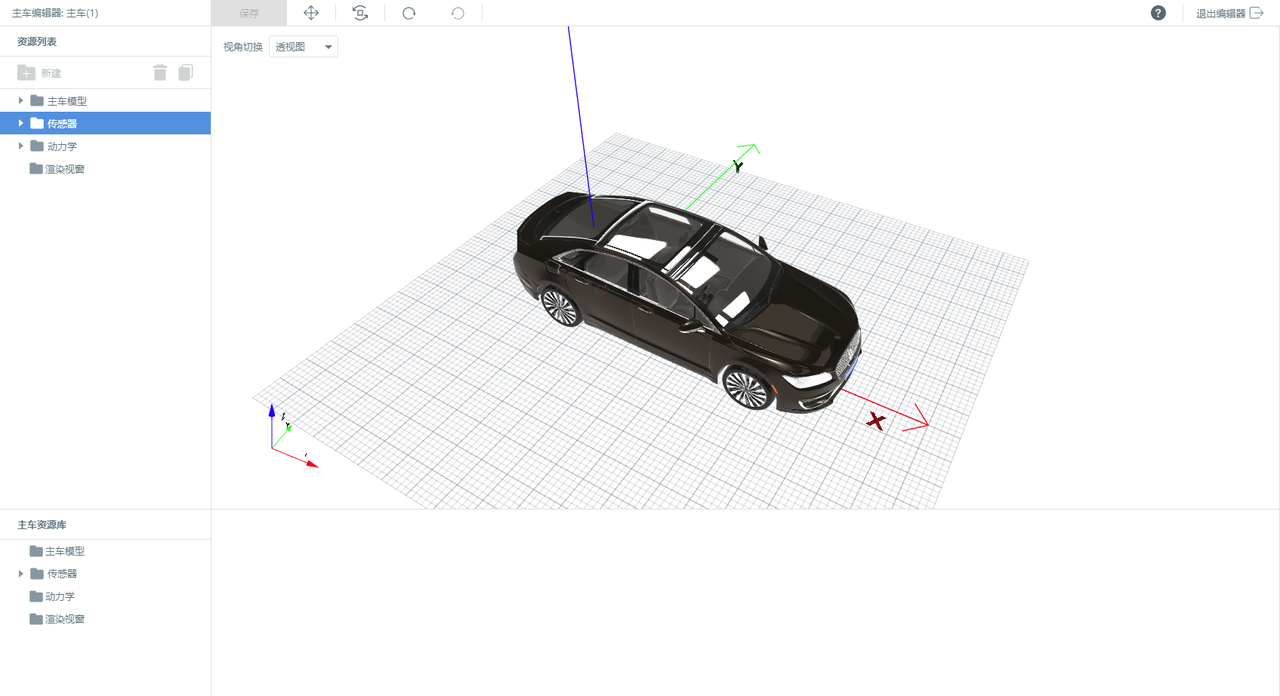
双击新建的主车,打开主车编辑器,首先为主车配置 主车模型 。
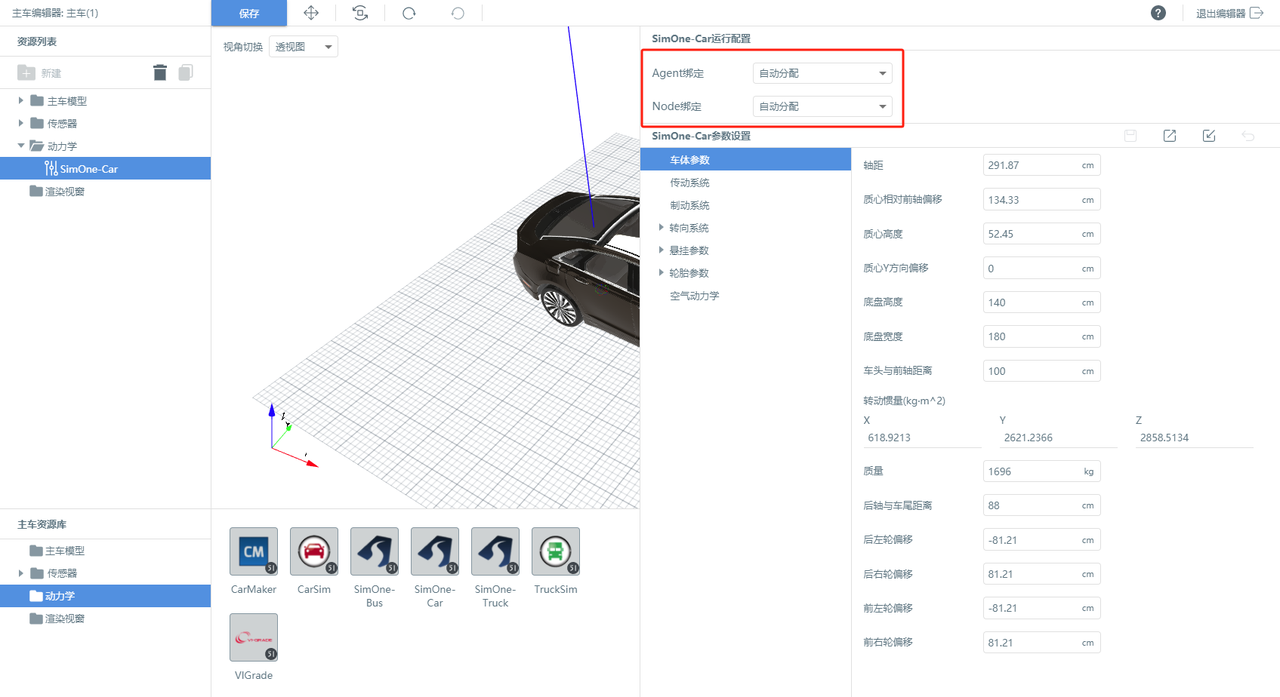
为主车配置 动力学 模型,并绑定动力学模型节点,如果需指定动力学模型在固定节点时需绑定(需提前在 Master Agent 资源列表里配置好动力学节点)。
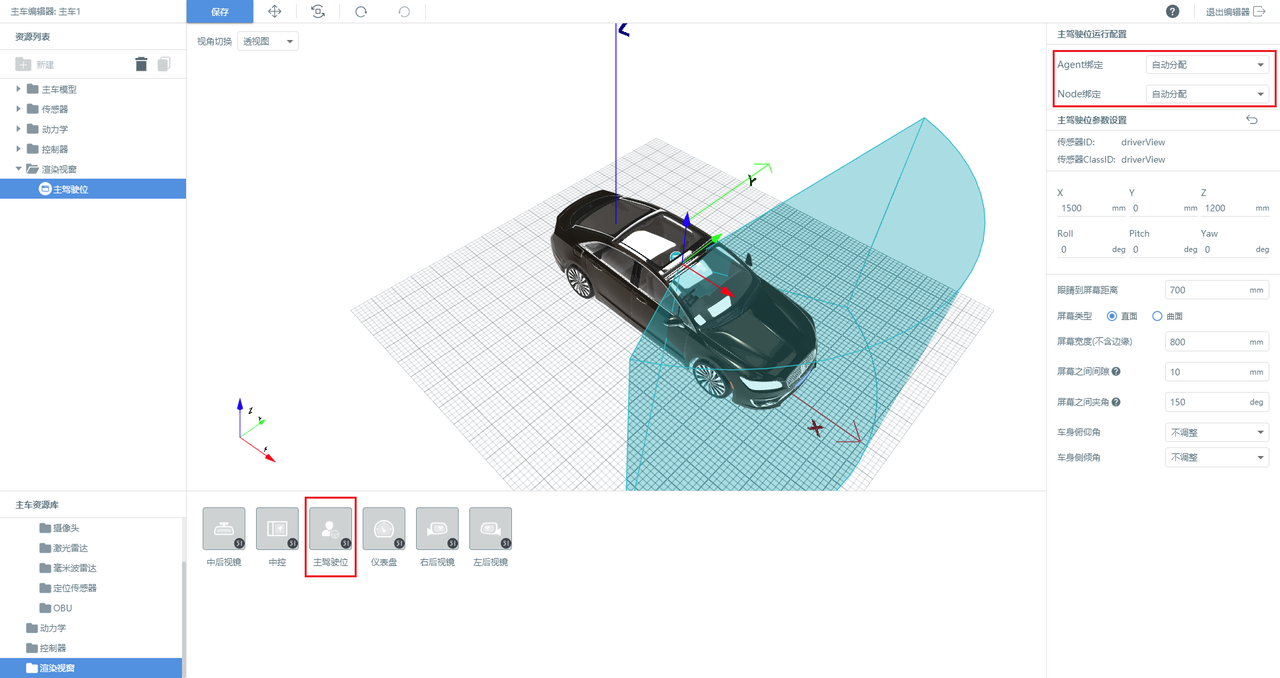
(可不配)为主车配置 渲染窗口 ,需要绑定固定的节点。
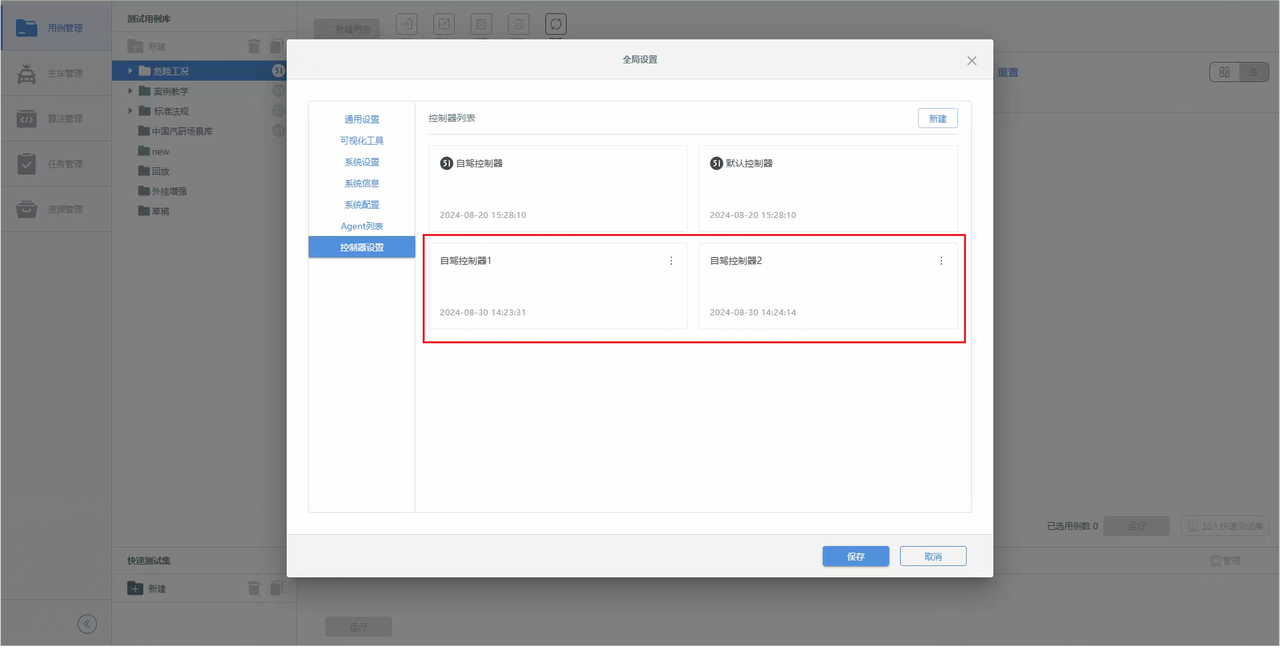
1.2 配置控制器¶
进入 全局设置-控制器设置-新建 。
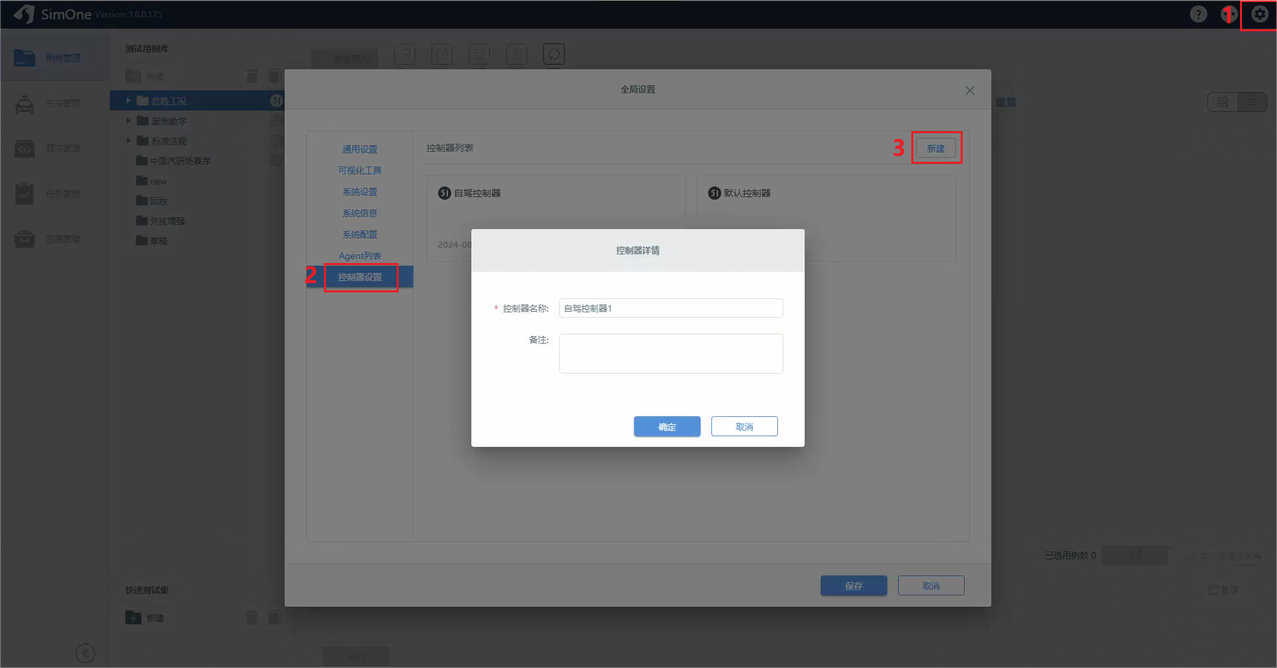
新建一个或多个控制器。
1.3 配置算法¶
进入 算法管理-新建算法 ,接入方式选择 驾驶模拟器。
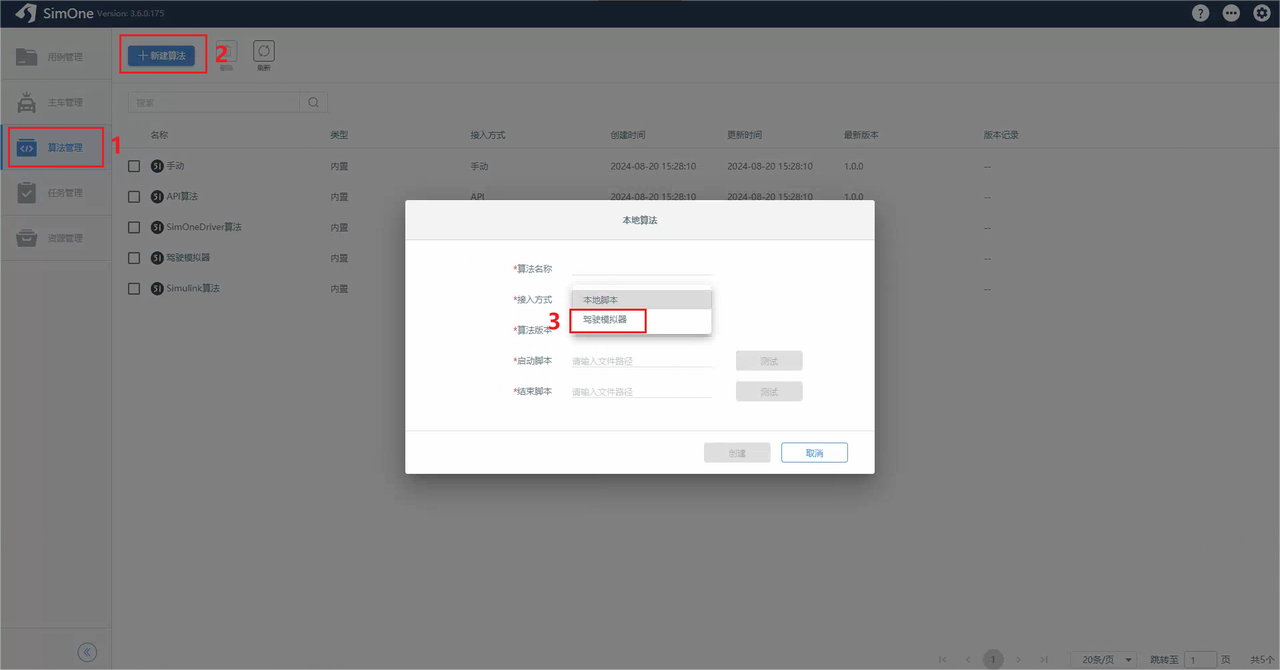
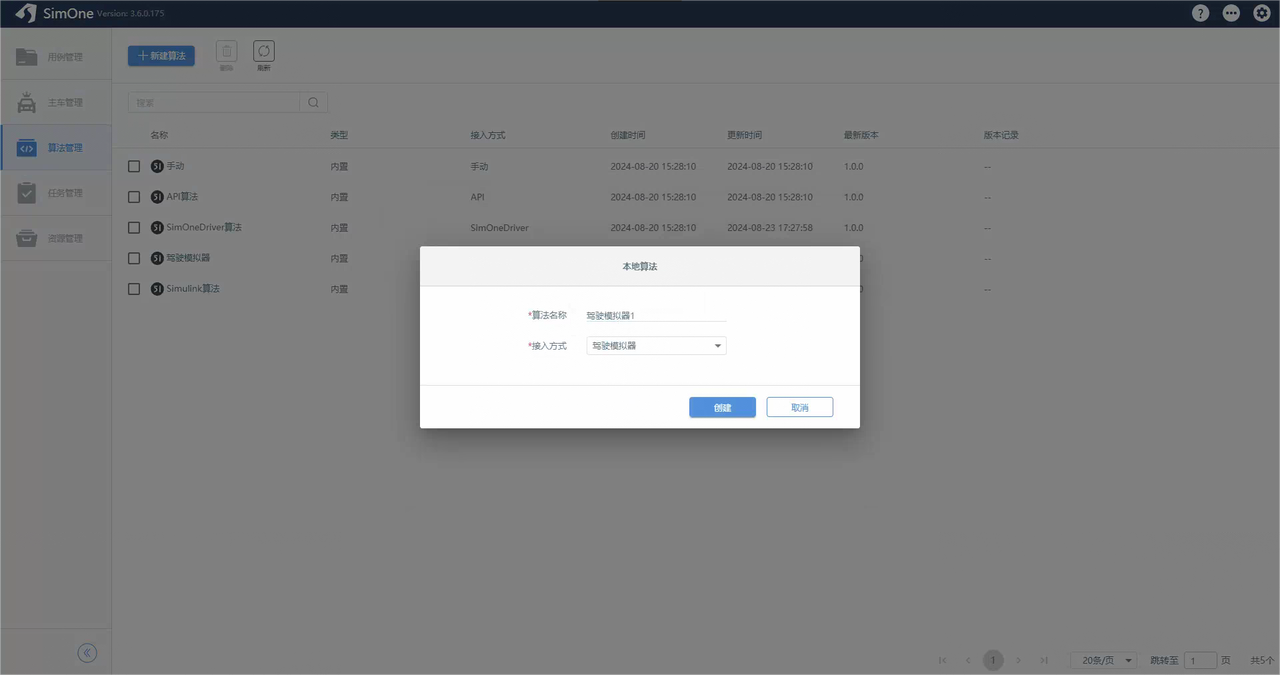
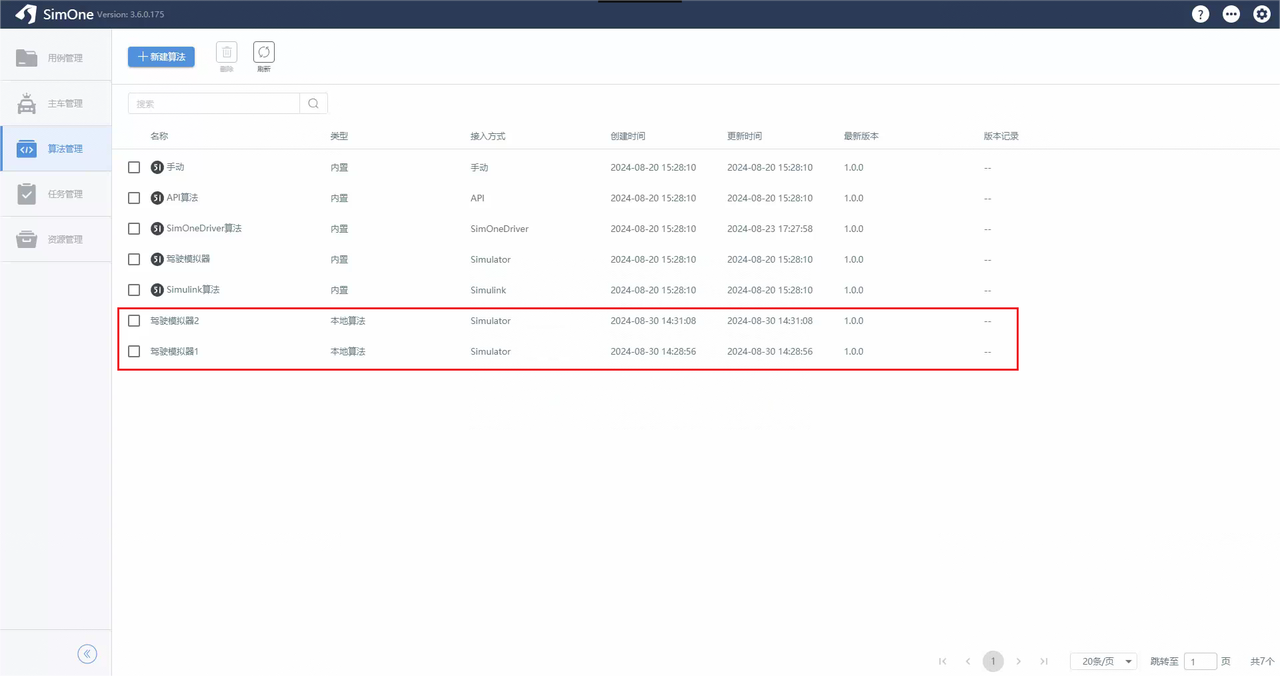
新建一个或多个驾驶模拟器算法。
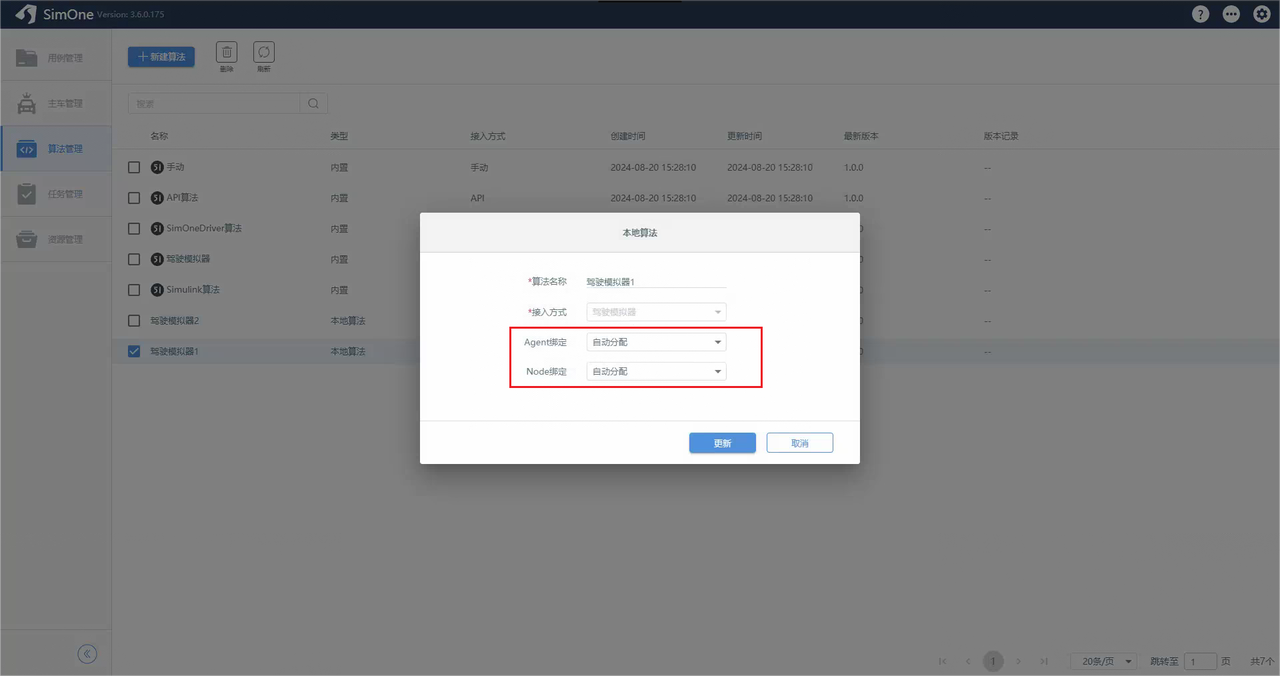
选择 驾驶模拟器算法 ,右键编辑。
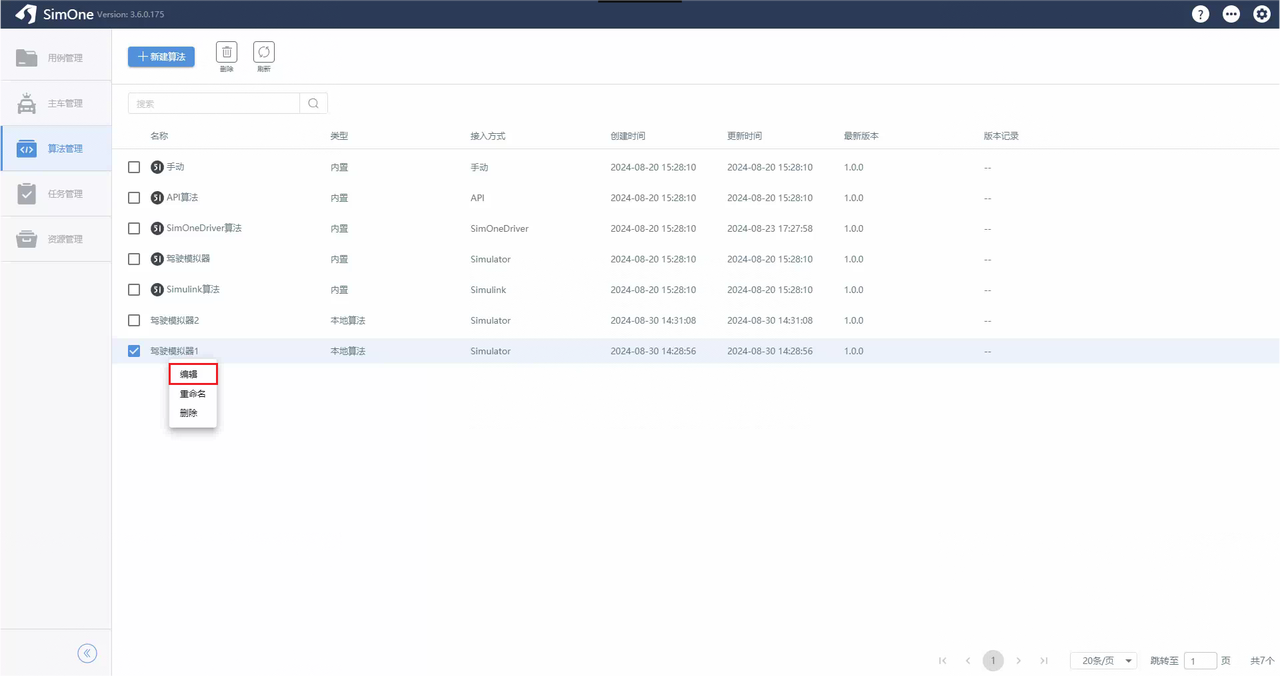
绑定Agent、Node。
1.4 新增多车互动案例¶
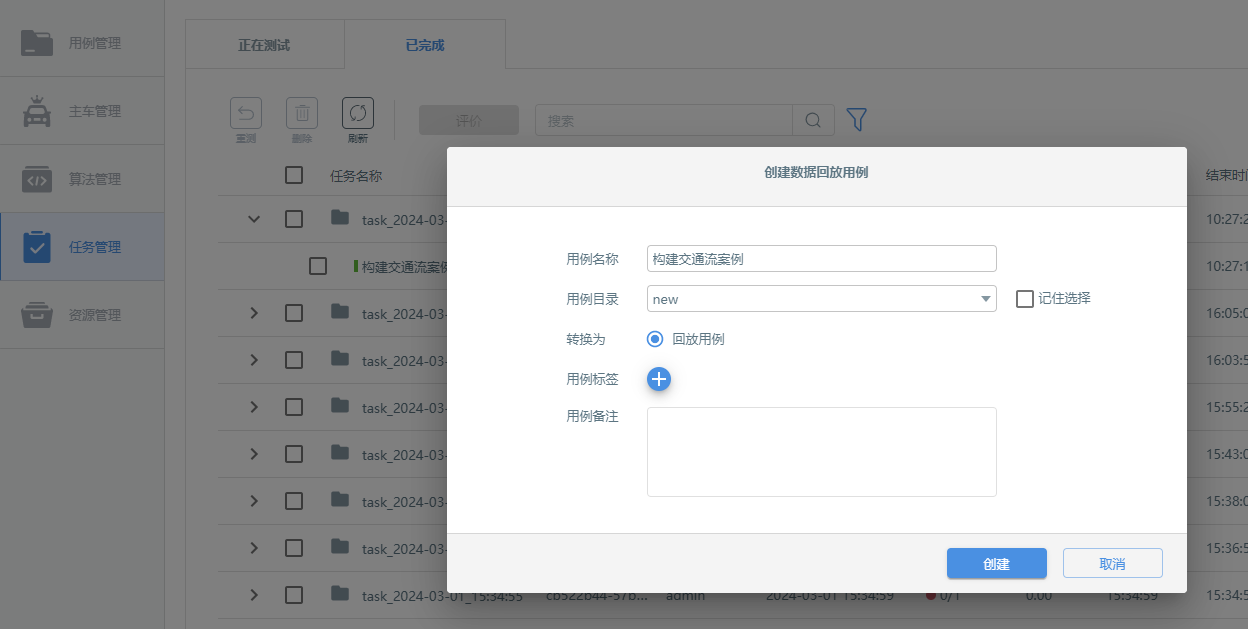
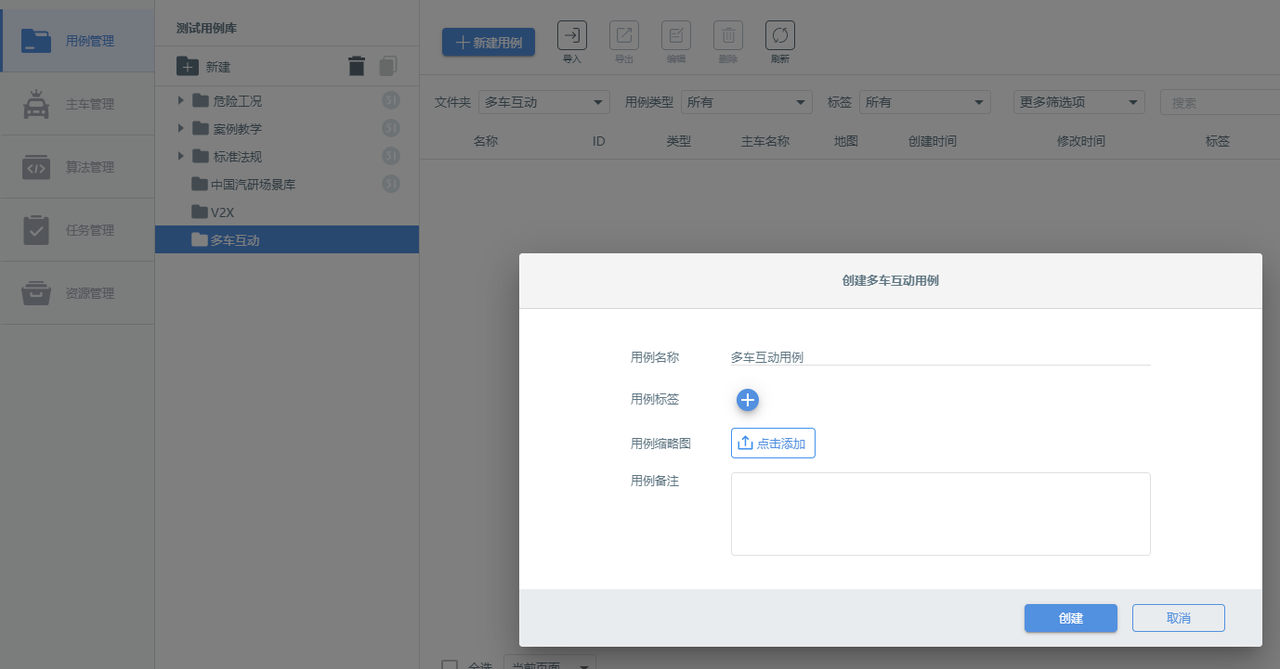
新建一个 多车互动案例 ,选择多车互动的案例类型,输入 案例名称 并点击 创建 。
创建案例成功,进入 案例编辑器 。
1.5 编辑多车互动案例¶
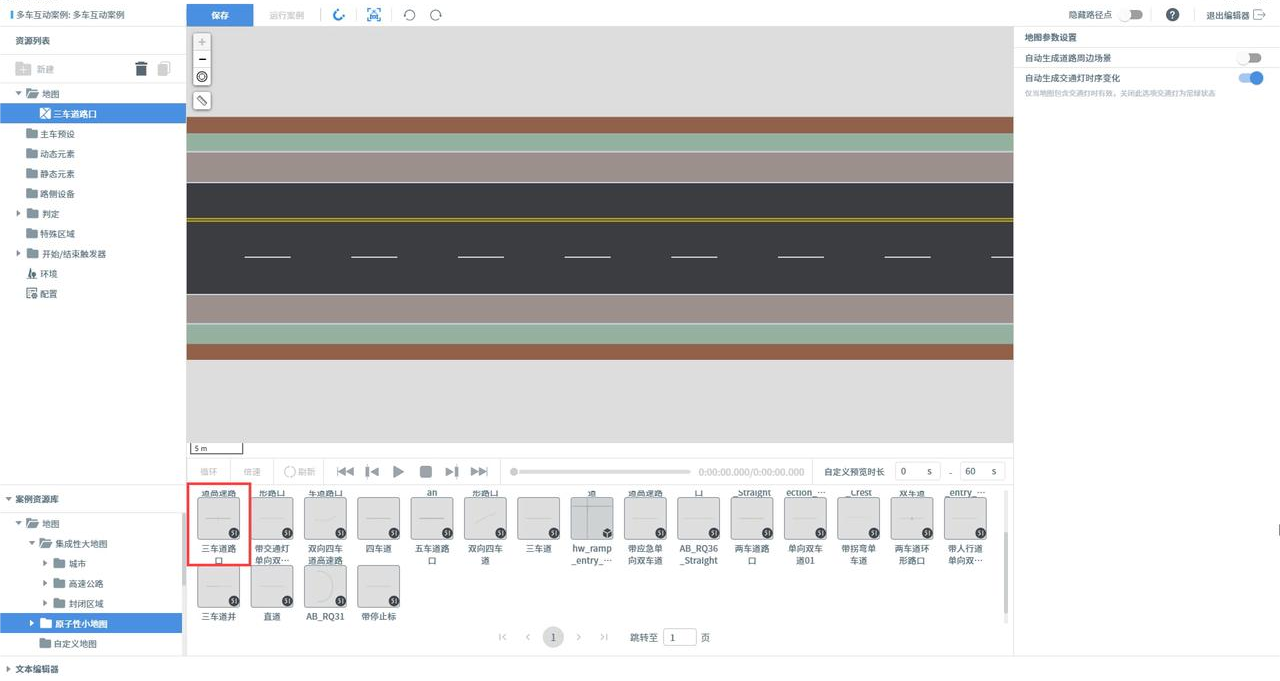
首先,为案例配置一幅 地图 。
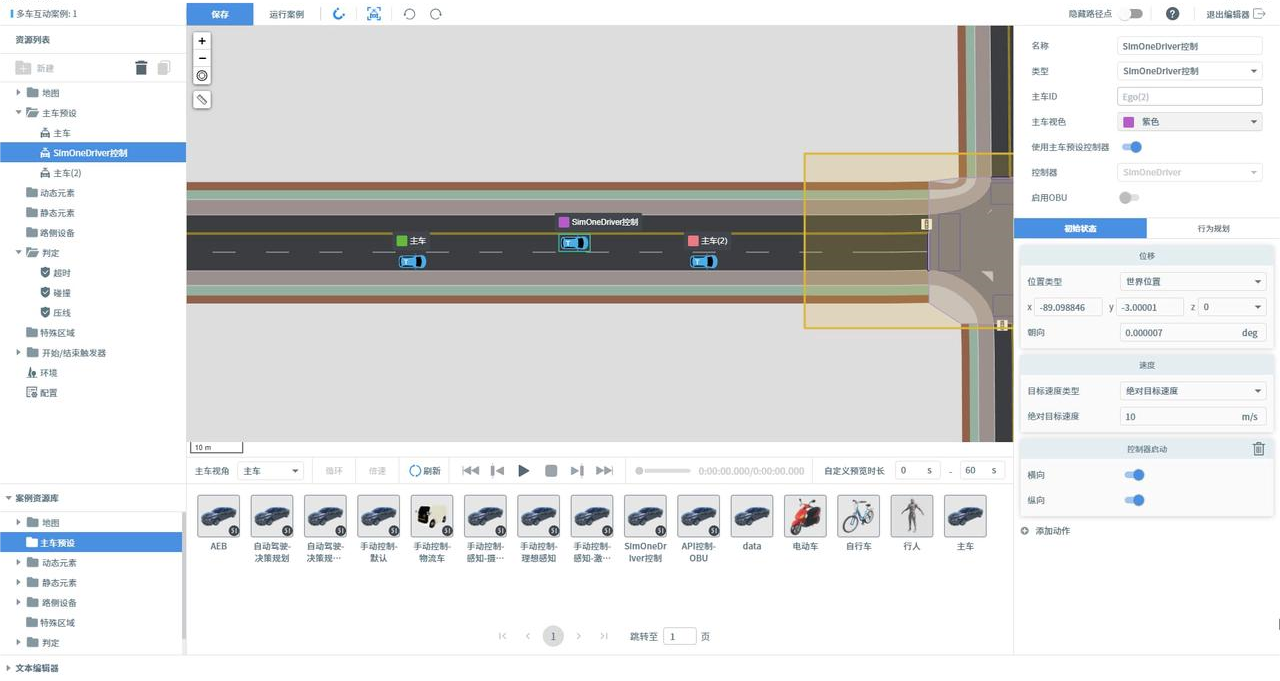
接着,为案例配置 多主车,向案例编辑器中拖入多主车,并编辑多主车路径,在此案例中将主车拖入地图即可。
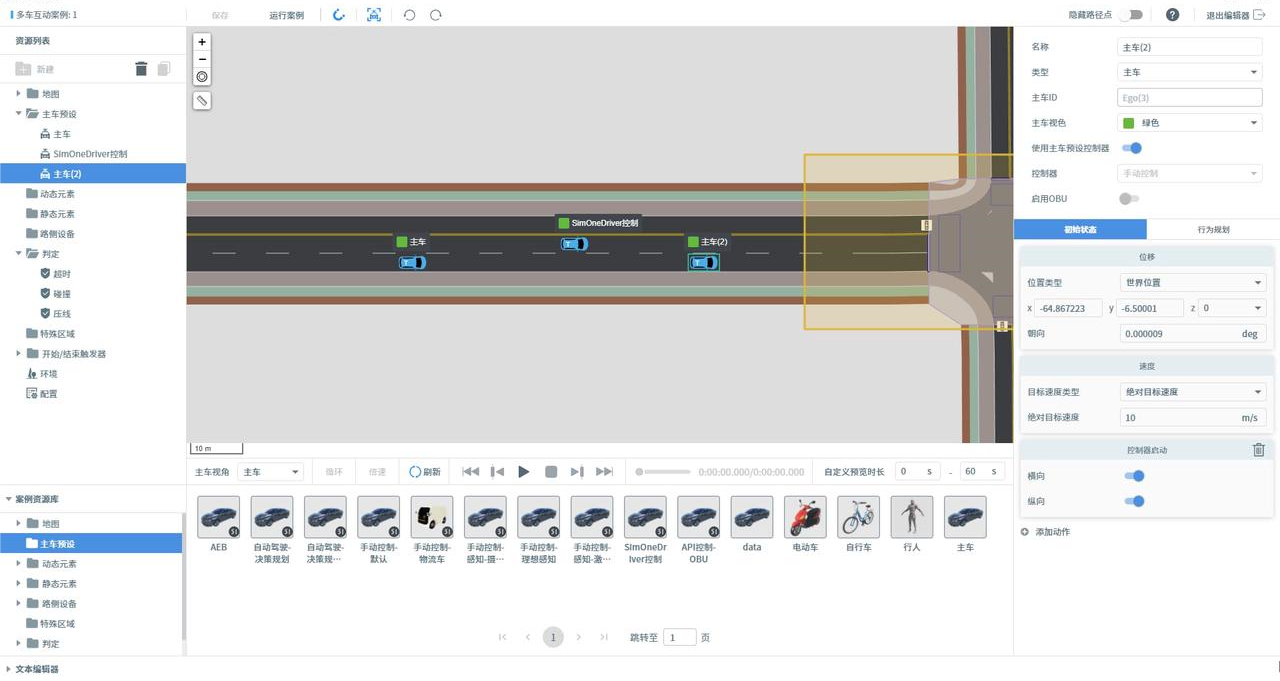
设置多主车配置,包括 主车颜色 等。
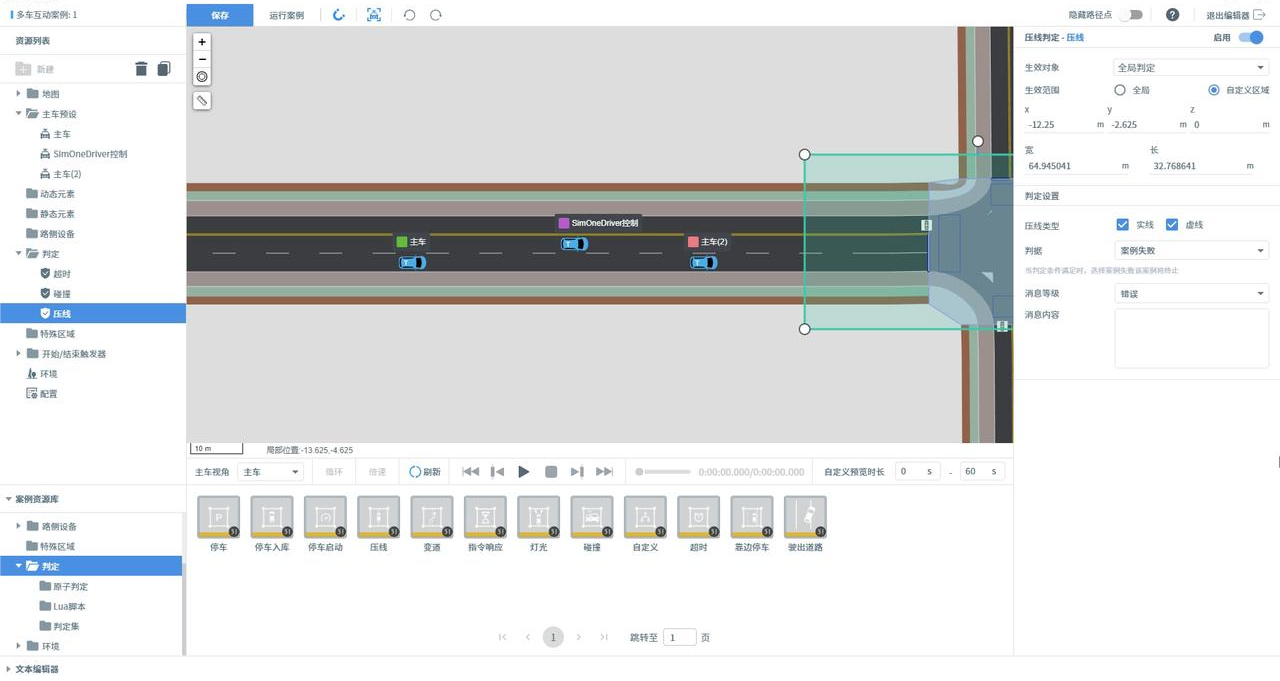
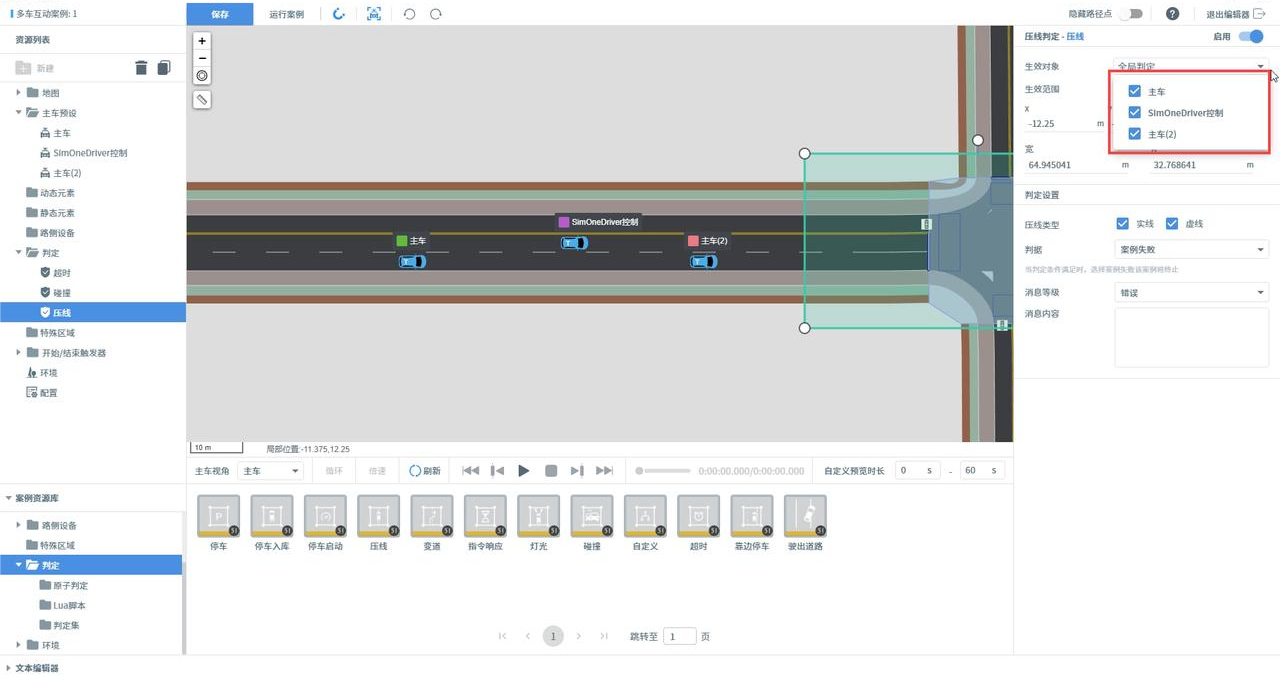
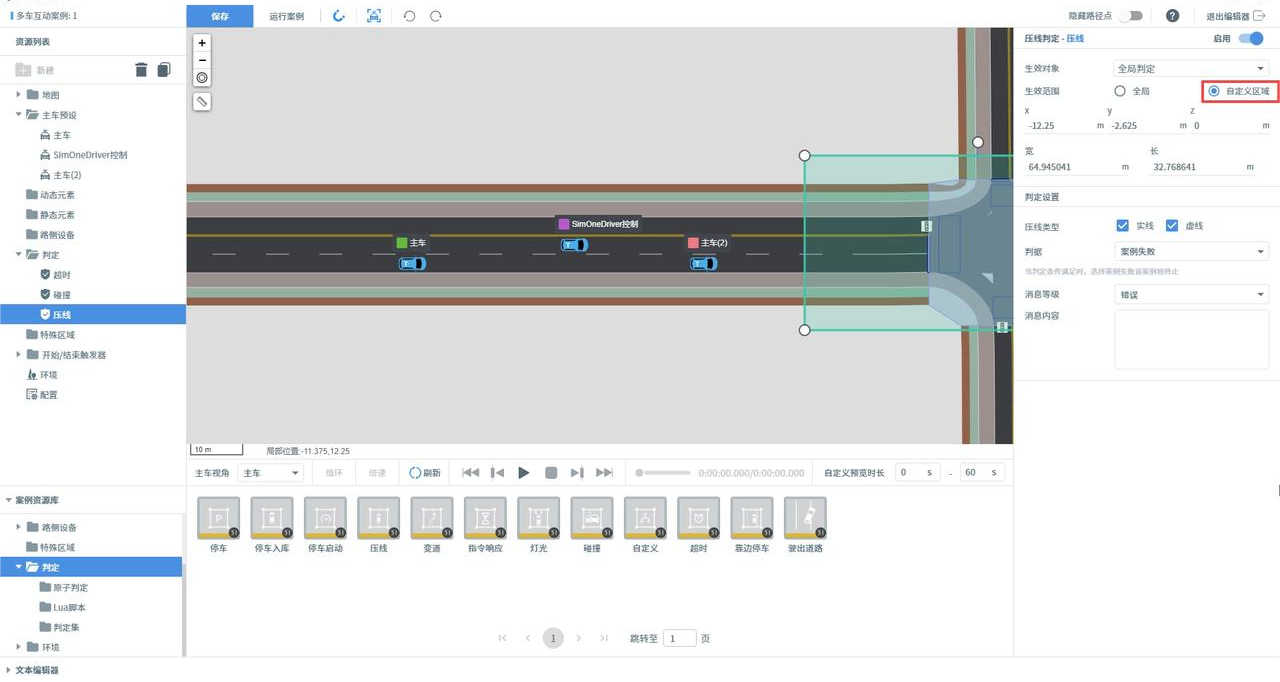
设置判定条件,在案例默认配置的 超时 、碰撞 两个默认的条件下新增 压线判定 ,并设置判定条件的生效对象和生效范围。
保存 案例并预览多车互动案例。
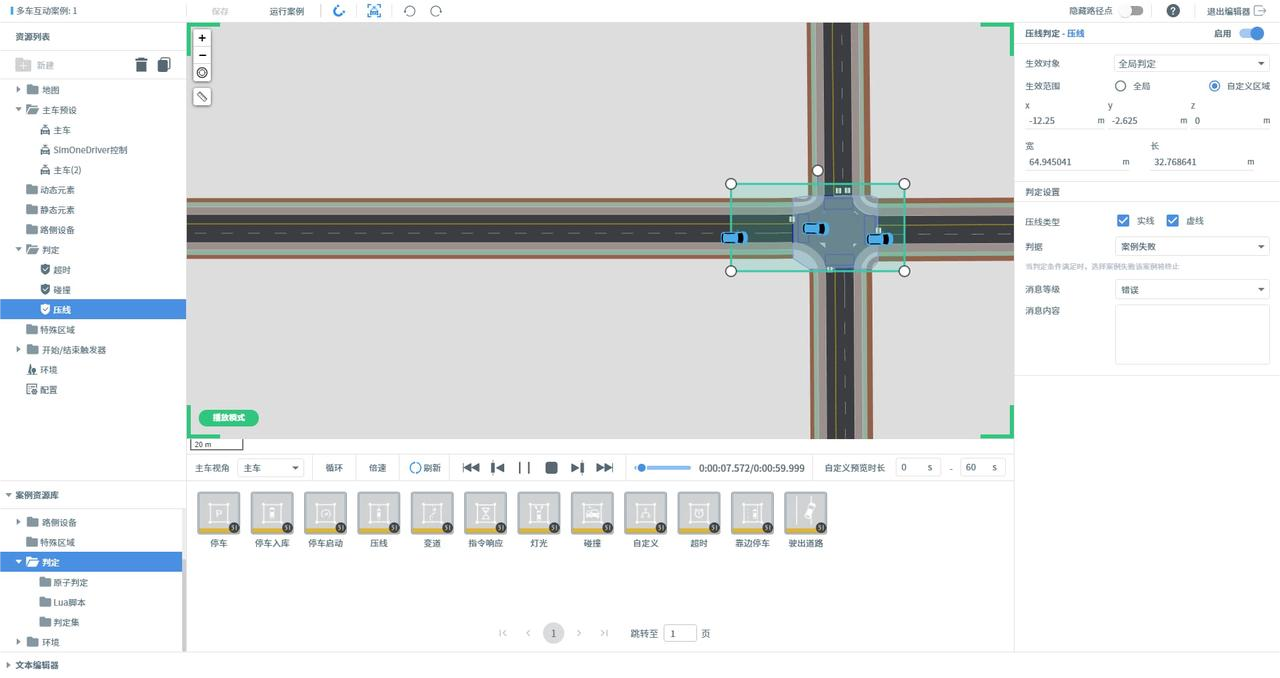
1.6 运行案例支持多主车¶
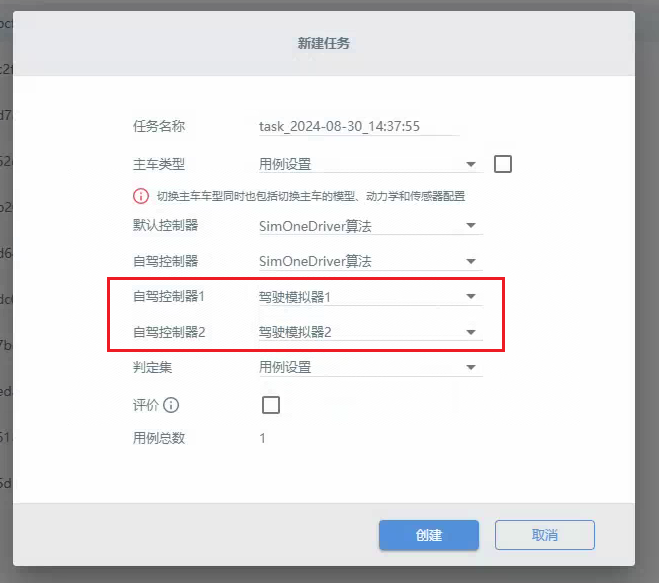
点击案例编辑器上方的 运行案例 按钮,弹出运行弹框,为主车配置 自驾控制器,并点击 创建 按钮。
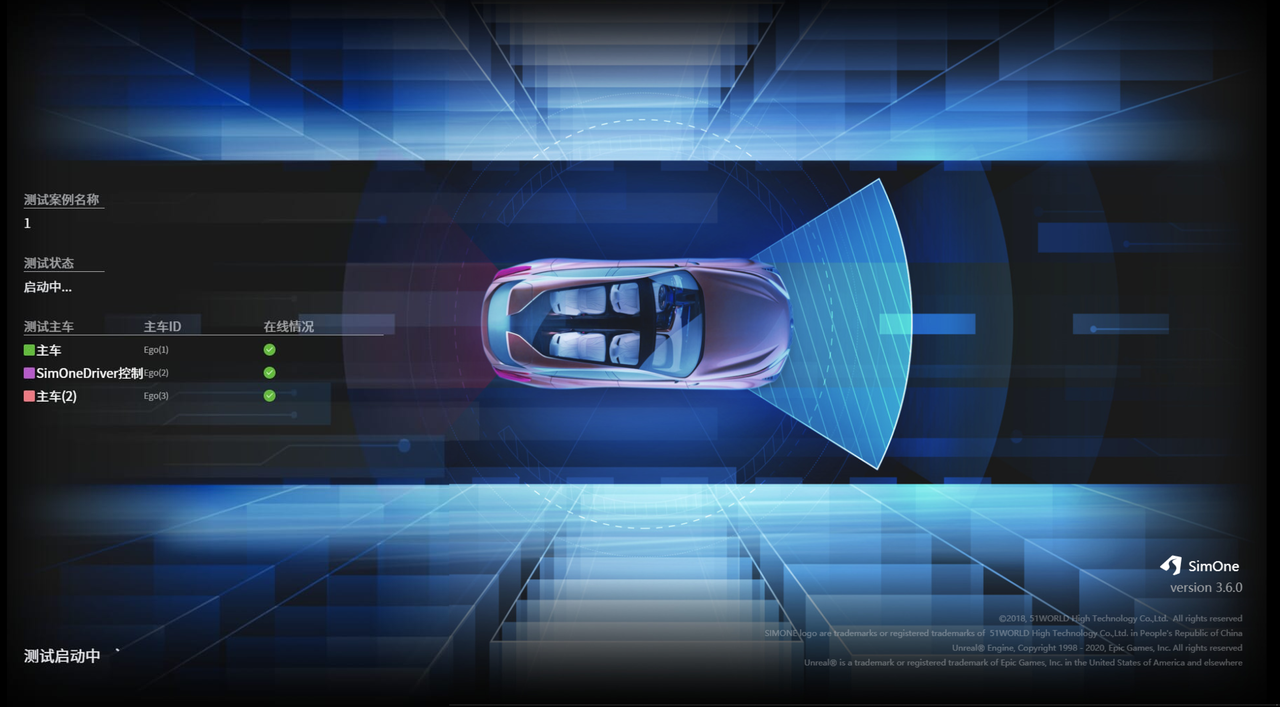
在 任务管理 正在运行的任务下查看 正在运行 的任务,并点击 监测 按钮。
在弹出的可视化窗口中先查看多主车连接的情况,然后再观察案例运行的情况。
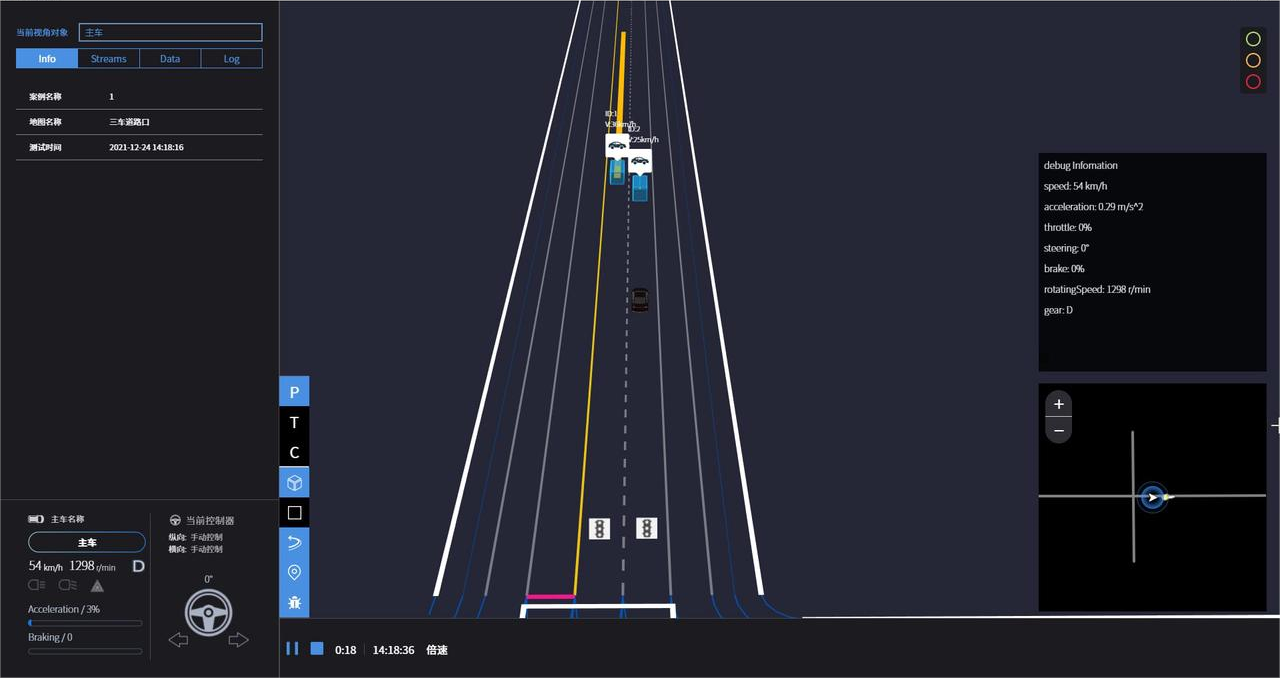
案例运行结束后,在可视化窗口上查看案例运行结果,如失败可查看到是哪个判定失败。
在已完成的列表中,可查看案例的结果,并下载案例报告和数据。

1.7 分布式架构全局设置中 Agent 列表管理¶
打开页面右上角 全局设置,并切换到 Agent 列表 管理模块。
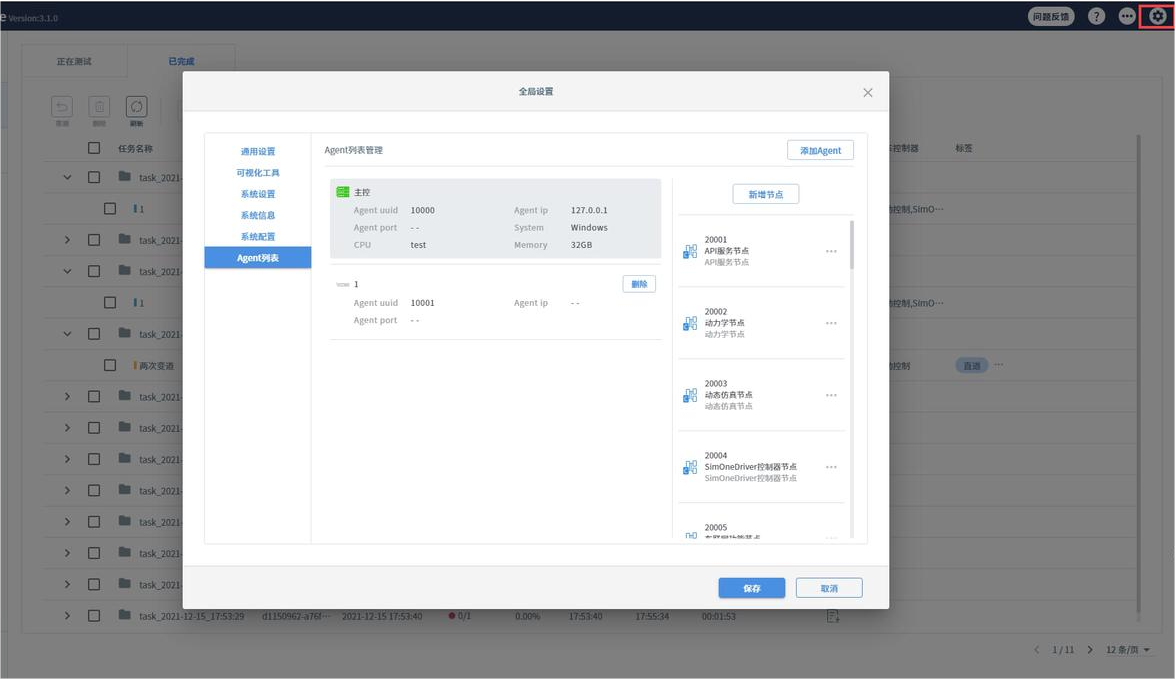
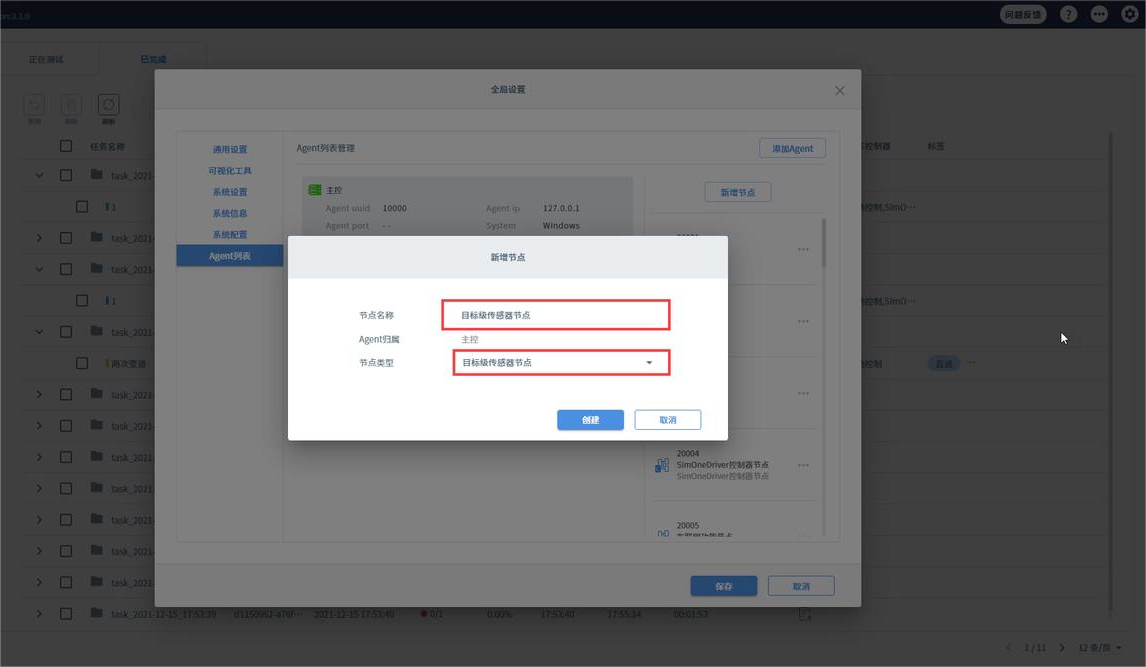
根据多车互动案例编辑的要求提前增加节点:如图所示,点击 新增节点 按钮,在弹框中输入 节点名称 和节点类型 。
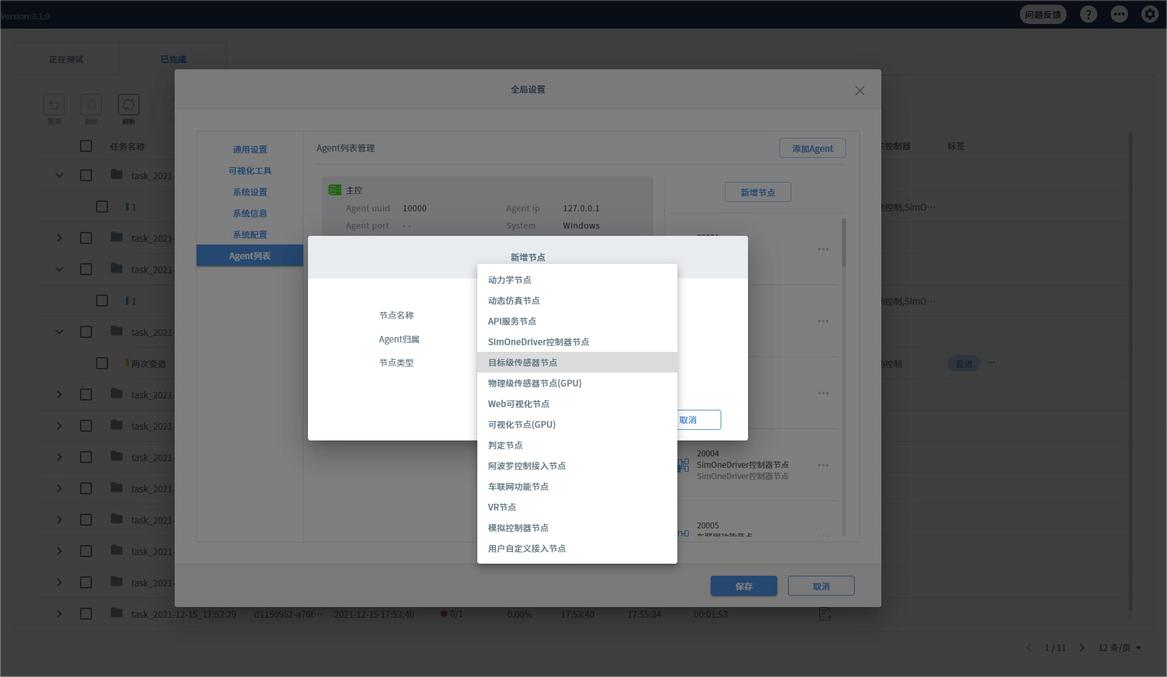
每一辆主车均需要一个主车动力学节点(默认是有主车动力学节点)
主车配置传感器需要配置对应的传感器节点(添加目标级传感器需配置目标级传感器节点,添加物理级传感器需配置物理级传感器节点)
主车控制器选择驾驶模拟器时,需增加模拟控制器节点
主车控制器选择 SimOneDriver 控制器时,需增加 SimOneDriver 控制器节点(默认是有 SimOneDriver 控制器节点)
主车配置渲染窗口包括仪表、中控和后视镜时需增加可视化节点(GPU)
案例配置时配置了判定条件,需增加判定节点
运行案例如果起渲染器是简化渲染模式需增加** Web 可视化节点**,如果起渲染器是高精度模式需增加可视化节点(GPU)
点击页面的 **新增节点 **按钮,即可逐一添加需要的节点,输入节点名称,选择节点 Agent 归属,选择节点类型并点击 创建 按钮。
创建成功后即可完成主车或案例相关节点的绑定。