可视化工具¶
高精度渲染¶
ID |
项目 |
描述 |
|---|---|---|
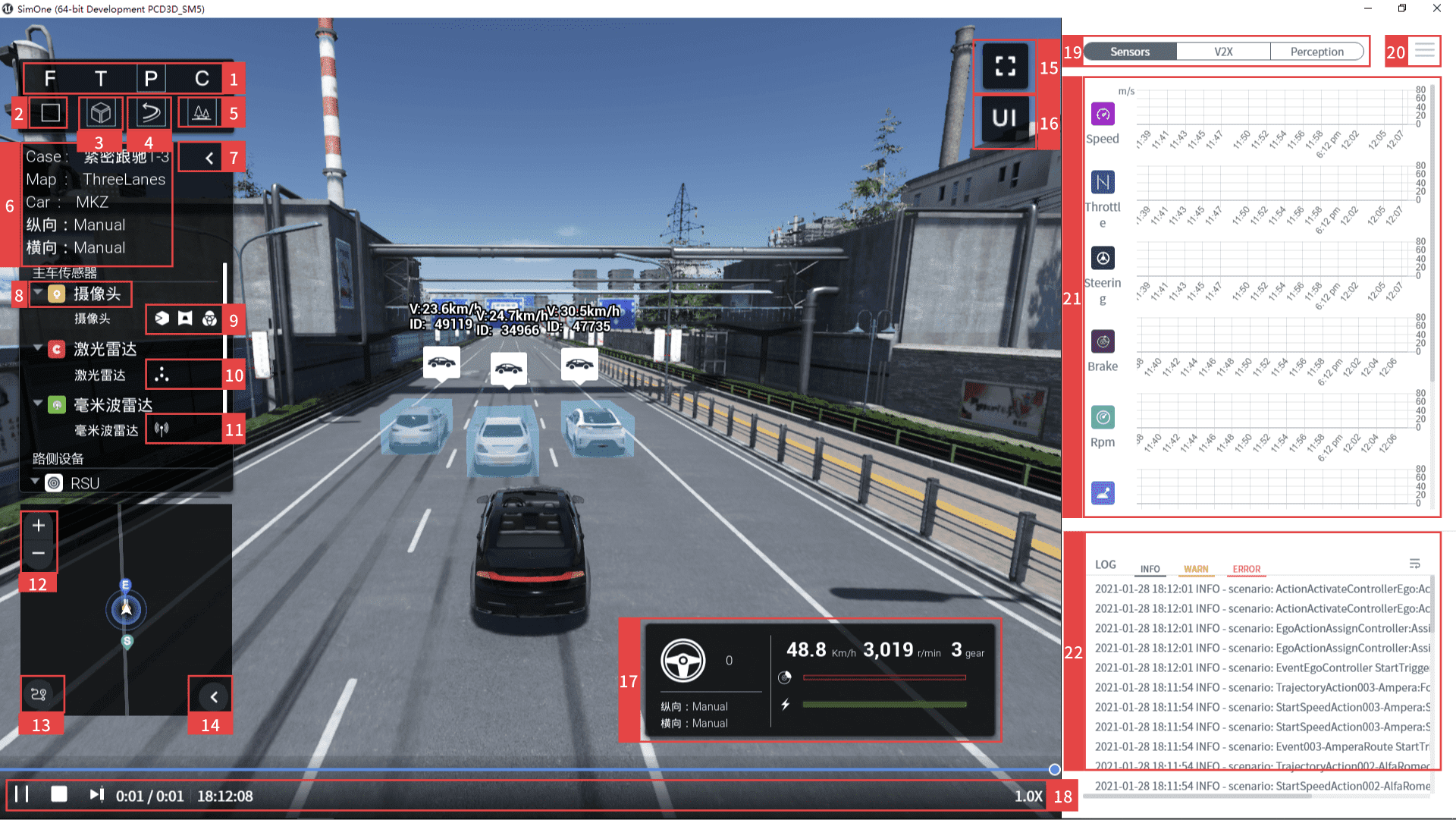
1 |
视角切换 |
包括free view(自由视角)、top view(顶视图)、perspective view(跟车视角)、 driver view(驾驶员视角)用户可任意切换任一视角, 在free view下可通过控制键切换观察车辆的角度且在手动控制模式下无法通过 控制键来控制车辆的前后左右运行在top view、perspective view、 driver view均可自由|控制车辆的前后左右运行 |
2 |
2D/bbox显示 |
测试场景中的对手车和元素将以2D bbox的样式显示出来,红色边框 |
3 |
3D/bbox显示 |
测试场景中的对手车和元素将以3D bbox的样式显示出来,3D模型边框 |
4 |
规划路径显示 |
显示运行主车的规划路径,会以紫色的路径指示展示 |
5 |
环境渲染打开/关闭 |
运行案例时,点击此按钮可展示/关闭在案例中建立的对手车、行人、非机动车及道路周边的建筑 |
6 |
案例基本信息展示 |
包括显示案例的名称、地图名称、主车类型、纵向和横向的控制器 |
7 |
收起菜单 |
点击此处可收起案例详情菜单 |
8 |
主车配置的传感器的基本信息 |
显示配置的传感器的名称,显示模式等 |
9 |
摄像头传感器采集图像显示模式切换 |
从左至右依次是深度图,语义分隔图,实例分隔图测试图显示模式,用户可自由切换至需要的模式 |
10 |
激光雷达显示模式切换 |
以可视化的形式展示激光雷达仿真效果 |
11 |
毫米波雷达显示效果切换 |
展示毫米波雷达的显示效果 |
12 |
小地图放大/缩小 |
展示测试过程中的主车实时位置朝向、路由,对手车的位置朝向等,“+”按钮放大地图,“-”按钮缩小地图 |
13 |
小地图全览开关 |
默认关闭,显示当前导航;开启后,显示主车行驶的整条路段 |
14 |
收起小地图 |
点击后可收起小地图、 |
15 |
observer窗口最大化 |
左侧的observer窗口最大化,隐藏传感器的实时参数的变化和测试的logs信息 |
16 |
显示/隐藏UI控件 |
点击此按钮可显示/隐藏observer显示界面上所有的UI控件 |
17 |
主车驾驶测试数据 |
包括方向盘实时反馈的转动、汽车控制系统的名称、方向盘数据、速度、转速、档位、刹车数据 |
18 |
UE可视化窗口进程控制 |
从左至右依次是暂停、停止、下一帧、已运行时长、总运行时长、当前时长、运行速率 |
19 |
实时参数面板切换 |
包括传感器、V2X、和感知三个类型 |
20 |
信息筛选 |
点击此按钮,弹出筛选框,用户可选择下方展示的数据类型 |
21 |
信息展示 |
通过顶部的Tab菜单切换显示内容,sensors展示主车的传感器动力学参数随时间变化的情况; V2X展示各类事件信息;perception展示了主车感知决策的信息 |
22 |
测试日志列表显示 |
展示测试过程中的测试日志信息,包括INFO、WARN和ERROR |
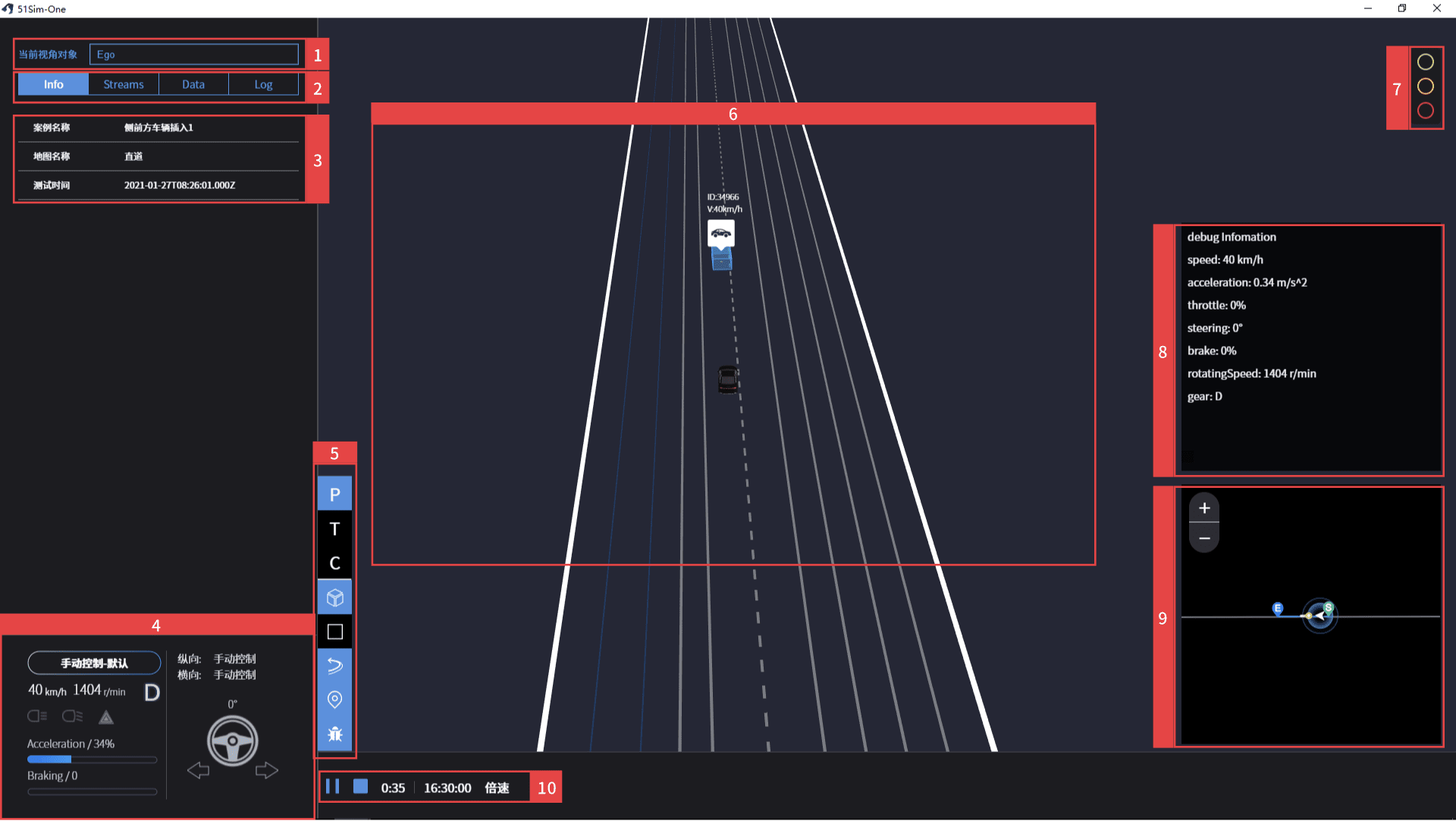
简化渲染¶
ID |
项目 |
描述 |
|---|---|---|
1 |
当前视角对象切换 |
是观察者视角选择,默认为主车,也可切换至其他对手车视角 |
2 |
信息展示栏 |
可通过点击切换至其他频道。 |
3 |
信息展示区域 |
默认是Info展示案例信息 |
3.1 |
streams展示主车相关数据 |
|
3.2 |
data分为sensors和V2X两块,sensors展示主车数据图表, 鼠标悬停在图表曲线任意位置时,可读取相应数据,v2x展示V2V、V2I等事件信息 |
|
3.3 |
log信息展示,默认显示全部类型,点击标题可切换显示/隐藏 |
|
4 |
主车信息展示区域 |
默认是Info展示案例信息 |
5 |
展示工具栏,从上至下依次为 |
P跟车视角、T俯视视角、C驾驶员视角、3DBoundingBox开关、 2DBoundingBox开关、Trajectory开关、小地图开关、Debug开关 |
6 |
案例测试可视化展示区 |
显示高精地图、主车、对手车、对手人等动态及静态物体 |
7 |
红绿灯 |
显示下一个路口红绿灯状态 |
8 |
debug信息栏 |
展示主车相关瞬时数据 |
9 |
小地图 |
同UE-obserber中的小地图 |
10 |
进程控制 |
从左至右依次是暂停、停止、已运行时长、总运行时长、运行速率 |