发布版本说明¶
版本发布的说明,包含每个版本的新增功能、bug修复以及常见问题列表。
重要
最新功能示例: 探索我们产品的新功能,请查看 功能示例与资源汇总。
v3.8.0 版本¶
发布时间:2025-12-30
新增功能¶
场景泛化能力增强(Web):支持在 Web 场景编辑中配置泛化参数,并可导出 / 导入 OpenSCENARIO(XOSC)逻辑场景文件,提升场景复用效率与跨项目一致性。
改进修复¶
优化动力学标定:优化动力学配置后案例验证提示、多进程 + 提前生成缩短标定时间、新增倒车标定及 PID 调节完善标定表功能,解决用户动力学标定相关的体验、效率与场景适配问题。
碰撞体生成规则优化:优化部分道路元素的默认碰撞体生成策略,使物理行为更加合理,降低不必要的物理干扰,提升仿真稳定性。
3DGS 仿真性能与稳定性优化:提升 3DGS 场景的整体性能与稳定性,改善复杂场景下的渲染一致性与流畅度。
感知与传感器仿真优化:整体提升感知仿真性能与稳定性,改善长时间运行和高负载测试场景下的体验。
程序化场景生成效果优化:提升自动生成场景在高精渲染模式下的显示一致性与可用性。
HD Map 能力增强:提升地图采样精度与查询性能,增强复杂路网和高精度规控场景下的仿真可靠性。
场景行为一致性改进:提升动态场景中目标车等交通参与者行为的执行一致性,使配置结果与播放表现更加一致。
Web 用例编辑体验优化:显著提升复杂用例和大规模路径点场景下的编辑与浏览性能,减少卡顿,提升整体可用性与稳定性。
接口与配置一致性优化:优化部分接口与配置逻辑,提升算法接入与任务运行过程中的一致性和可靠性。
安装包优化:打包为整体,提升安装的稳定性。
优化用户手册:升级用户手册架构,结构更清晰,内容更充实。
v3.7.0 版本¶
发布时间:2025-10-15
新增功能¶
任务创建流程全面升级,实现主车、用例与算法解耦:主车配置不再绑定算法,用例通过抽象控制器独立定义行为,任务创建支持主车、算法、版本灵活组合,显著提升用例复用率与测试覆盖度,助力跨项目快速验证与高效交付。
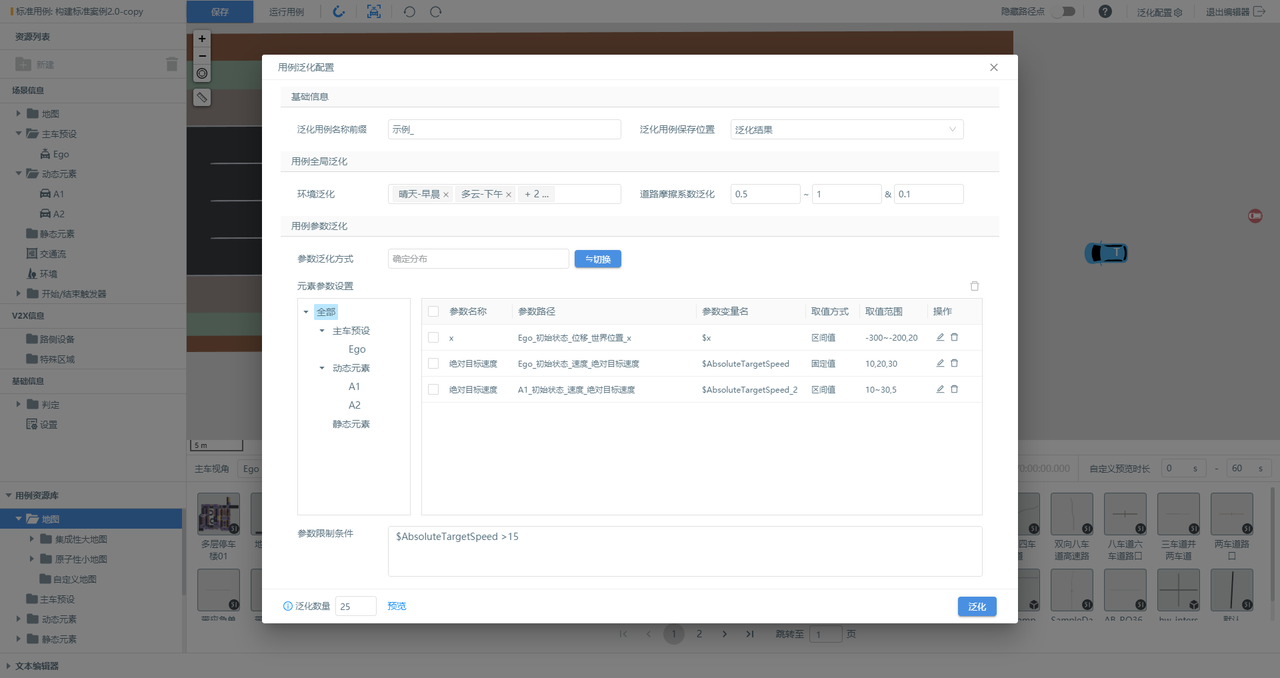
场景泛化:支持界面化选择与配置泛化方式和参数,结合环境与道路摩擦系数等多维组合,系统性扩展 ODD 编辑范围,提升自动驾驶算法的测试覆盖度与泛化鲁棒性。
混合动力:支持混动行星齿轮模式和并联模式,混动模式下可分配多个电机输出到轮端。
第三方动力学接口:支持车轴、轮胎、悬架等参数配置,并通过通信接口传入车辆姿态、轮胎位置,返回接地点位置与法向量,实现更灵活精准的对接。
超声波雷达:支持多个超声波雷达之间形成交叉回波。
用户自定义触发指令:新增 UserDefinedValueCondition 条件类型,支持外部值比较与交互,实现 OpenSCENARIO 未覆盖的复杂或自定义条件判断,扩展场景逻辑灵活性。

算法输出数据存储:新增运行中算法输出数据的存储与管理,支持结果查看与下载,便于后续分析与性能评估。
自定义评价框架:支持以 Python 脚本开发自定义评价算子,可融入内置评价体系进行打分融合,也可独立生成自定义评价报告。
任务集结果对比:在测试计划管理中,新增图表化分析功能,支持不同算法版本结果对比,帮助测试与研发团队高效识别迭代过程中的结果差异,加速问题定位与算法验证。

3DGS场景资源扩展:新增3DGS停车场场景,更新3DGS十字路口场景效果。
CICD 自动化集成测试(协作版):支持云端 Docker 镜像算法接入,结合测试计划与 Restful API 无缝对接 Jenkins,实现算法版本持续迭代与自动化验证,加速更新与部署效率。

改进修复¶
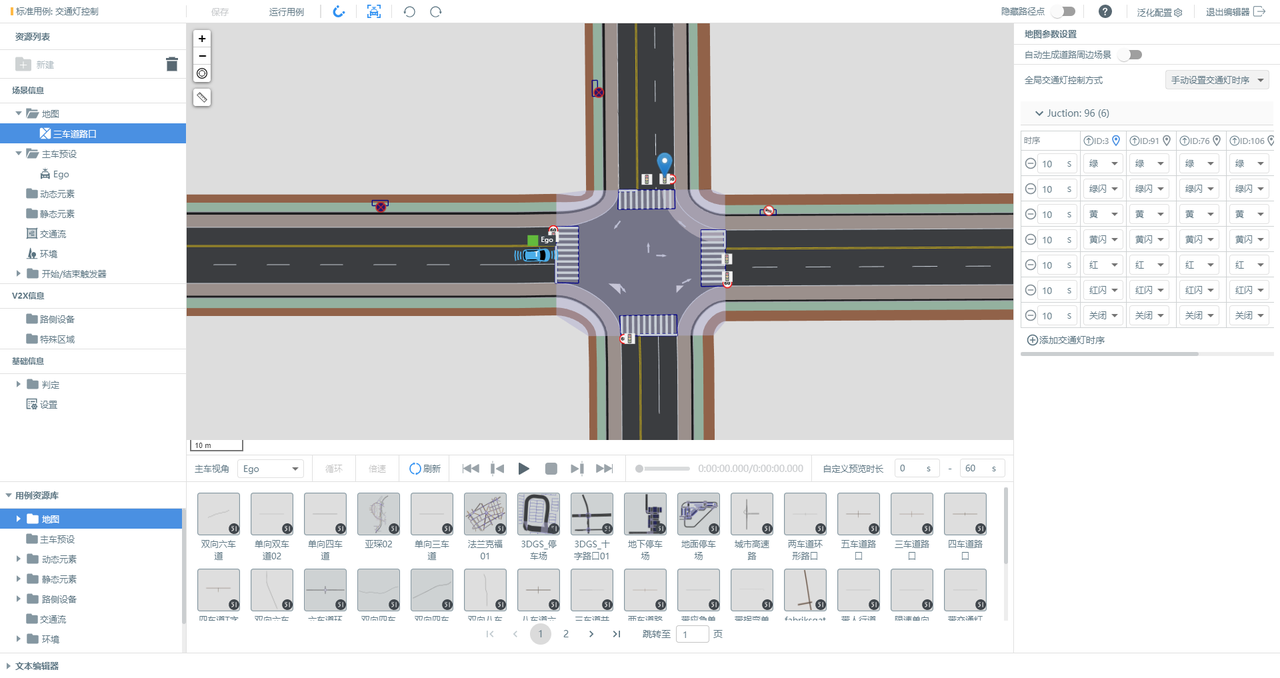
交通灯控制:优化交通灯控制方式,支持自动生成时序、默认常绿、默认熄灭及手动设置4种控制方式,并可统一配置全局状态与时序,帮助用户模拟真实路况下的交通灯变化及异常场景,提升测试覆盖率与场景还原能力。
传感器性能优化:4K畸变相机和鱼眼相机仿真帧率提升,API输出支持30+ fps稳定输出。
动力学性能优化:加速度控制模式跟随效果提升,Simulink模块性能优化,支持四轮转向。
算法回传数据存储:优化回传数据管理,支持回放中查看算法预测轨迹,提升任务回放展示一致性并助力问题定位分析。
磁盘空间预警:支持自定义阈值监控磁盘状态,因磁盘空间不足导致的用例回放文件存储失败、应用崩溃等问题,提升磁盘管理的可靠性。
任务支持多人独立回放(协作版-云端) :优化云端任务回放功能,支持任务独立回放不占用测试并发节点,允许多人同时发起回放操作,提升资源利用率与协同验证效率。
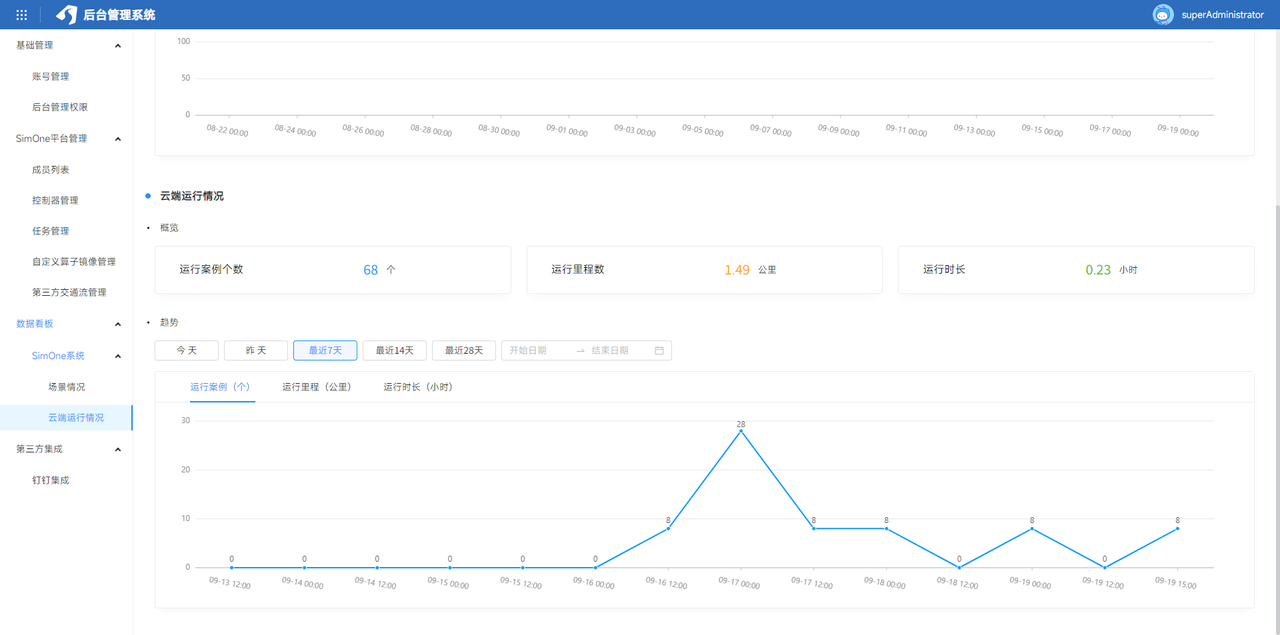
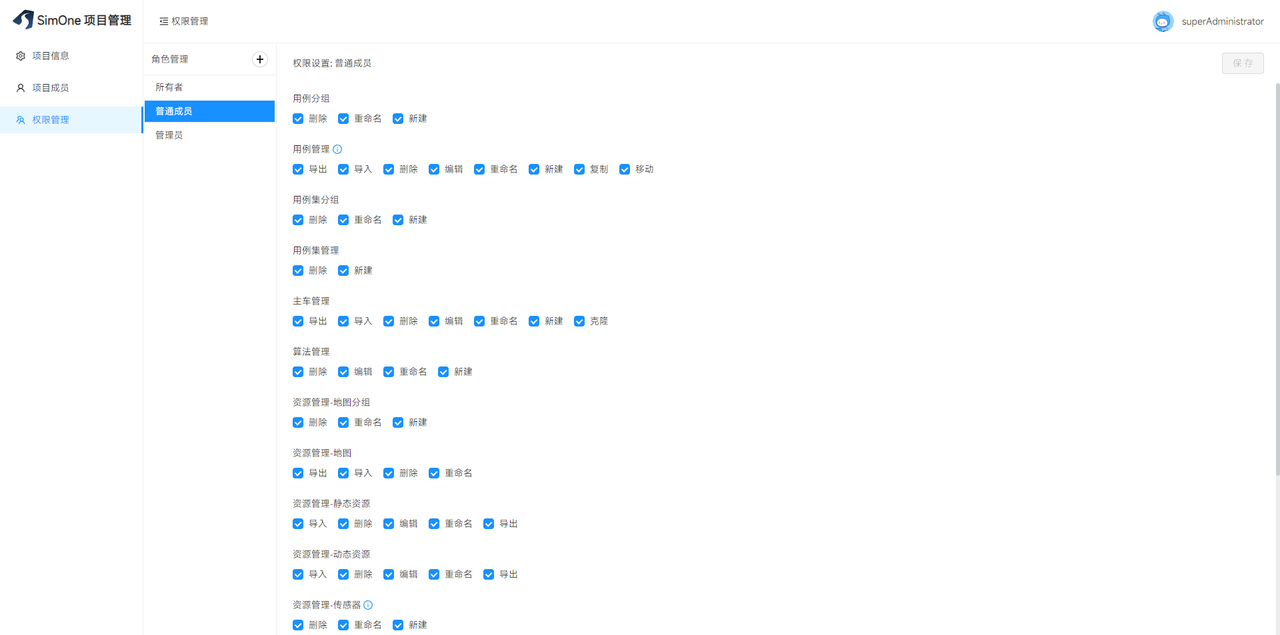
后台管理系统(协作版-云端):面向协作版优化后台,新增部门管理与角色权限配置,并统一管理控制器、自定义算子镜像、第三方交通流镜像、数据看板及钉钉通知等系统级资源,实现高效集中管控。
新增项目设置(协作版):支持项目内用户数据共享与跨项目隔离,并可配置成员及角色权限(当前版本仅支持默认项目,后续将扩展多项目管理)。
问题修复:SimOne API 更新及若干已知问题修复。
修复的bug:
修复任务简化渲染时,throttle与torque切换展示问题;
修复动力学标定问题引起的车辆低速度运动非预期抖动和减速问题;
修复用例编辑器展示车道类型展示问题;
修复用例编辑器环境-模拟真实开关未生效问题;
修复主车导入传感器视窗和配置展示空白问题;
修改运行任务切换主车,其主车模型尺寸未传到engine,导致计算BBox距离错误问题;
修复主车编辑器传感器禁用,传感器数量统计问题;
修复linux系统下,任务高精可视化窗口最大化时,任务运行结束,窗口界面内容依旧小窗大小问题;
v3.6.0 版本¶
发布时间:2024-10
新增功能¶
新增 3DGS_十字路口场景:基于最新的 3D 高斯泼溅(3DGS)技术构建,旨在提供用于端到端感知闭环仿真场景。
散点地图引擎和工具链支持:导入除 OpenDRIVE 以外的散点地图,解决数据驱动闭环的外部地图输入问题,并支持非结构化道路。
4D 毫米波雷达:新增物理级 4D 毫米波雷达传感器模型。
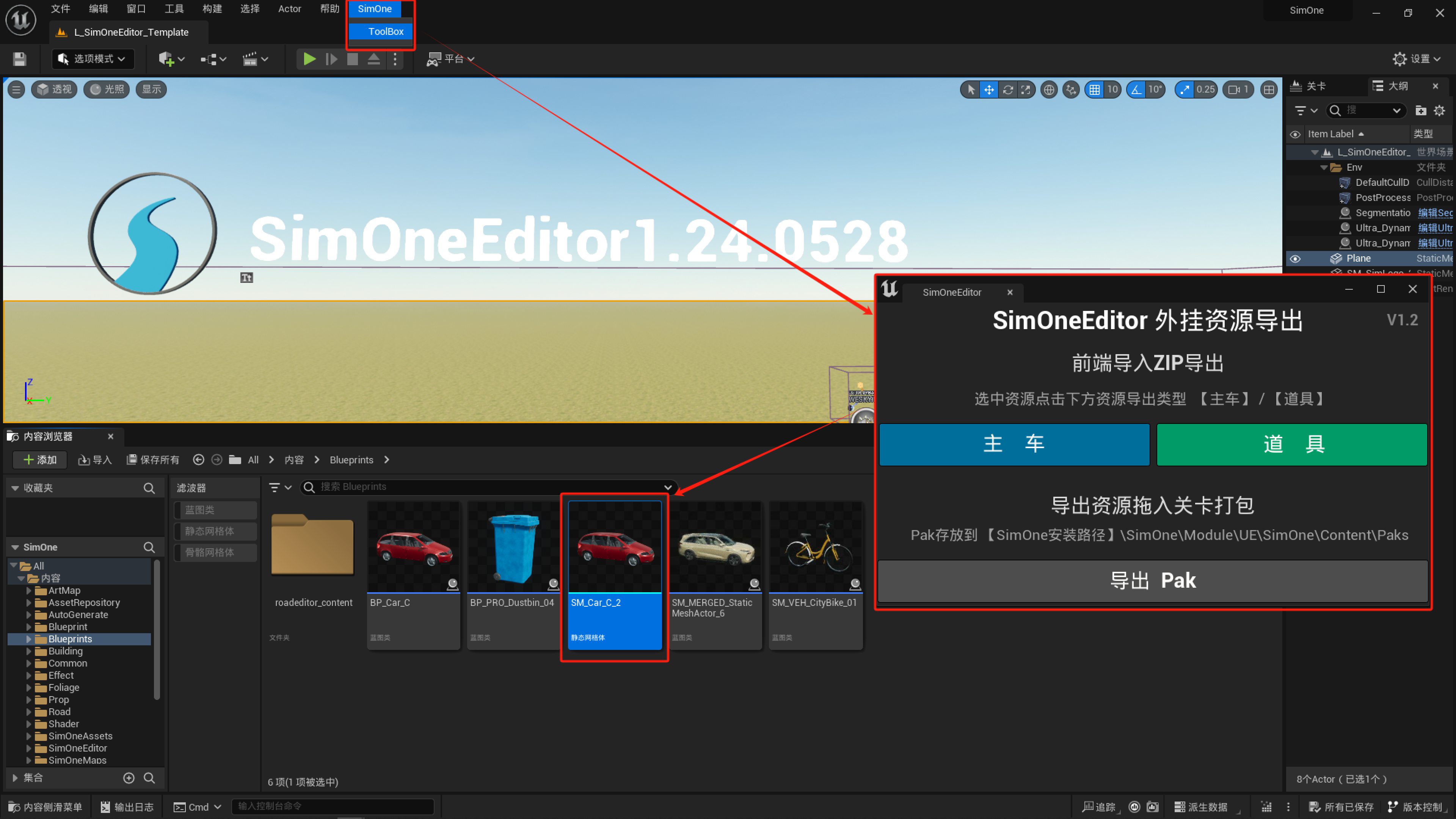
外挂资源打包插件:新增 UE 打包插件,简化外挂资源挂载至 SimOne 的操作流程,有效提升工作效率和用户体验。

交通半智能体:解决采集数据的碰撞问题,提升实采数据的可用性和交通流的多样性。
改进修复¶
场景生成优化:提升自动生成场景的效果,并改进美术资产质量,支持散点地图。
系统架构和动力学节点优化:支持 1000Hz 高频更新,有效减少 HIL 仿真过程中的延迟。
开发者文档:重新梳理开发者使用流程和相关教程,帮助开发者更容易上手。
夜景效果增强:增强原子地图三车道夜景的感知效果。
问题修复:修复若干已知问题。
v3.5.0 版本¶
发布时间:2024-03
新增功能¶
产品结构升级调整,实现云端和客户端数据协作共享
实现云端和客户端的无缝连接,使用例、主车、资源数据能在云端共享;
新增账号密码登录方式;

优化调整主车预设,升级为主车管理,使主车的管理更加便捷;
新增算法管理模块,区分出:云端算法可共享,满足云端批量验证的需求,客户端算法面向研发人员,便于进行研发联调测试,更贴近用户使用场景;
控制器优化调整,与主车解绑,用户在用例中设置控制器来代替算法;将具体的算法与用例也解绑,方便用例多场景共享使用;
调整了创建任务流程,在创建任务界面,增加选择控制器匹配的算法,提升了用例共享的灵活性和算法验证的便捷性;
新增了后台管理,管理员可以进行系统层面的账号管理、任务管理、控制器定义管理,使管理更加高效。
改进修复¶
修复了已知问题。
v3.4.0 版本¶
发布时间:2023-11
新增功能¶
感知仿真全新升级
对感知仿真模块以及数字资产进行了彻底的升级,显著提高了渲染的品质与真实感。
TOD 天气系统升级
支持配置环境里的时间与光照、天气、材质影响等参数设置。
提供晴天、多云、雾天、雨天、雪天、沙尘天等天气预设参数。
提供道路脏污、标线破损、干湿度、雪覆盖度、标志牌脏污破损等的材质影响参数配置。

新增场景库
新增综合城区01。
新增SOTIF资源
增加轮胎、纸箱、路桩、雪糕筒、婴儿车、手推车等资源。
改进修复¶
Dump 功能增强
感知数据集能力增强
外挂场景能力增强
SimOneDriver 支持混合控制
场景编辑器能力增强
安装优化
评价指标扩展
etc..
v3.3.0 版本¶
发布时间:2023-04
新增功能¶
评价系统
支持根据用户自定义的指标体系对规控算法进行打分评价。
评价结果以报告形式呈现,且支持离线下载评价报告。

导入动静态元素
支持导入fbx、obj等格式的模型文件,生成丰富多样的测试用例。
支持导入图片,例如通过导入标定图片的形式来还原出现场真实搭建的标定间。
新增SOTIF资源。
改进修复¶
驾驶员模型增强。
传感器仿真增强。
后台管理增强。
已知问题修复。
v3.1.2 版本¶
发布时间:2023-01-05
改进修复¶
优化了软件安装流程(仅限windows版)。
增加了API。
优化了交通元素名称显示。
修复了已知问题。
v3.1.1 版本¶
发布时间:2022-07-20
改进修复¶
优化安装和启动的流程。
优化IP地址配置的流程。
更新用户问题手册,增加用户常见问题页面。
优化数据驱动的性能。
用户参考手册增加交通灯控制小节。
修复场景案例无法运行成功的问题。
v3.1.0 版本¶
发布时间:2022-04-15
新增功能¶
分布式系统升级,从安装、配置、管理多个层面提升分布式仿真的可用性
全新的安装包支持分布安装,能够方便的将主车节点、传感器仿真节点部署在不同的系统上来进行联合仿真。
系统托盘功支持对分布仿真节点进行管理以及监控。
新增驾驶模式,对视景系统进行整体优化提升,让用户感受到接近真实效果的汽车驾驶体验
新增可以自由配置的驾驶员视角、仪表盘、中控、后视镜等。
优化驾驶模拟器接入方式
新增加驾驶模拟器控制器,可通过配置该控制器的主车,方便接入和配置模拟器硬件

加强判定能力,新增lua判定脚本和判定集
支持用户自定义lua判定脚本上传;lua判定脚本上传后,将与内置判定类似,在案例编辑可以添加lua判定脚本,且在运行案例时,lua判定脚本也会根据案例运行情况,给出用户在lua中约定的结果,lua脚本为用户提供了自定义判定的方式。
支持用户将部分常用内置判定和lua判定脚本定义为判定集,并在案例编辑时添加判定集,在运行案例时,该判定集中的判定将会同时生效。
新增内置资源,提升场景的丰富度和可用
交通元素:普通对手车、行人*2、自行车、路障*6、标定*3
传感器:激光雷达预设*2
控制器:驾驶模拟器
渲染窗口:主驾驶位、左后视镜、中后视镜、右后视镜、中控、仪表盘
v3.0 版本¶
发布时间:2021-10-27
新增功能¶
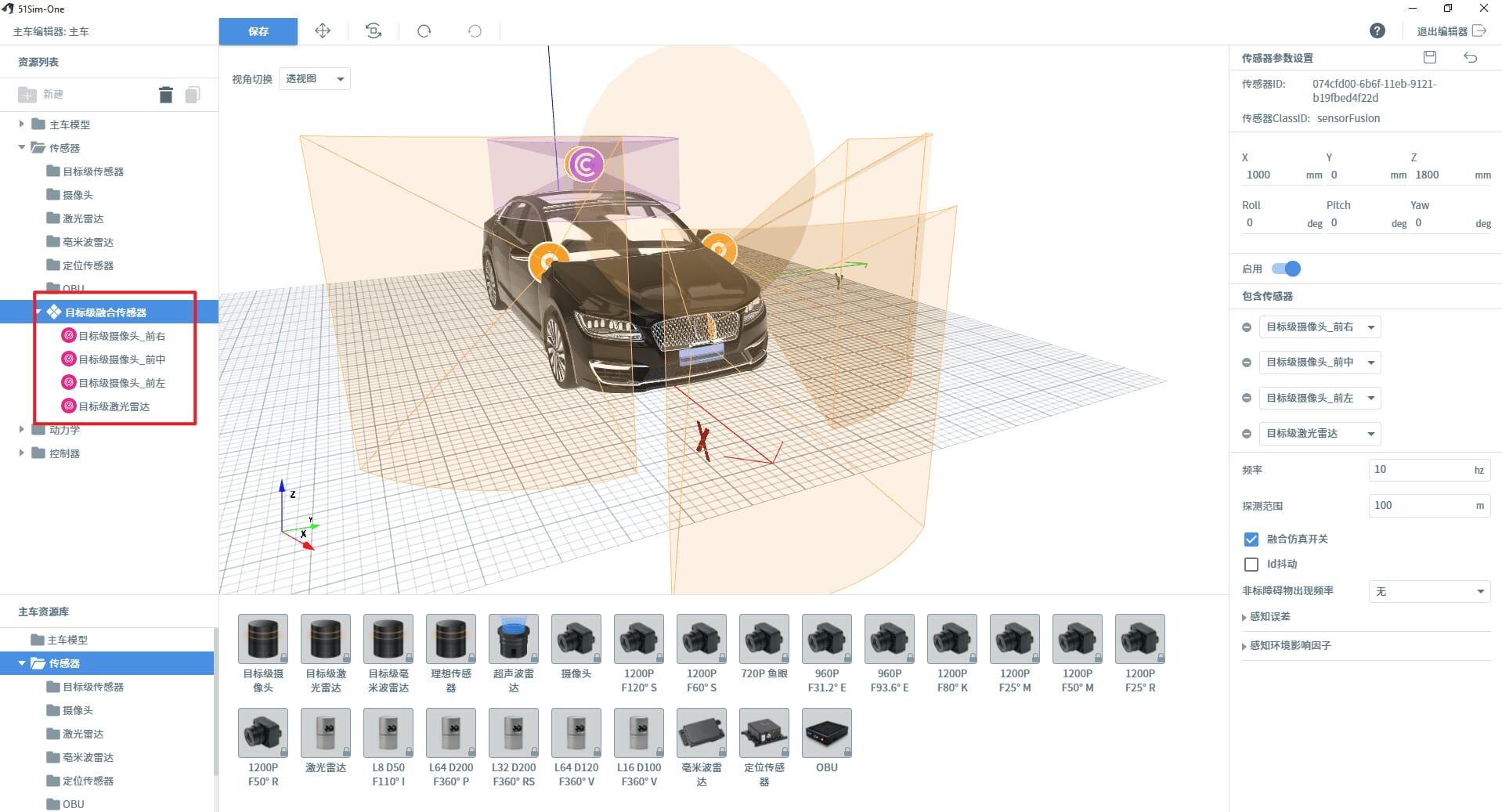
路侧设备增加融合传感器组
支持路侧设备添加融合传感器组的功能
增加物流车模型
主车模型库新增物流车模型。
支持Simulink自动连续运行联合仿真测试
使用Simulink联合仿真时,可选择自动运行模式,SimOne将自动连续调用最近激活的simulink工程运行测试。
案例库升级 - 案例库增加C-NCAP2018
改进修复(网页端)¶
改进修复
优化调整资源库文件夹目录结构。
更新内置资源的标识。
修复主车OBU开关状态不对的问题。
修复案例导入的问题。
修复案例库筛选功能的问题。
修复无法创建主车预设的问题。
修复内置地图和World Editor不一致的问题。
修复案例编辑器内关闭自动生成交通灯时序,V2X信息显示不准确的问题。
v2.2 版本¶
发布时间:2021-07-02
新增功能¶
增加物流车模型
主车模型库新增物流车模型。
支持Simulink自动连续运行联合仿真测试
使用Simulink联合仿真时,可选择自动运行模式,SimOne将自动连续调用最近激活的simulink工程运行测试。
案例库升级 - 案例库增加C-NCAP2018
改进修复¶
改进修复 - 优化调整资源库文件夹目录结构。 - 更新内置资源的标识。 - 修复主车OBU开关状态不对的问题。 - 修复案例导入的问题。 - 修复案例库筛选功能的问题。 - 修复无法创建主车预设的问题。 - 修复内置地图和World Editor不一致的问题。 - 修复案例编辑器内关闭自动生成交通灯时序,V2X信息显示不准确的问题。
v2.0 版本¶
发布时间:2021-03-11
新增功能¶
场景编辑器2.0
场景编辑器2.0全面支持OpenSCENARIO 1.0的标准。 - 支持静态、动态对象的摆放和配置。 - 支持交互式的方式来编辑Event、Action、Condition等场景要素。 - 自带语法高亮的OpenSCENARIO文本编辑器。 - 支持在案例编辑器内预览调试场景编辑成果。 - 支持路网服务,多种position类型可切换。 - 支持接入用户算法及混合驾驶测试模式。
支持导入自定义主车模型
支持用户导入自定义的主车模型用于仿真测试。
支持导入自定义场景
支持用户导入自定义UE场景用于仿真测试。
新增原子地图
新增2张停车场原子地图: - 地下停车场 - 地面停车场
新增目标物可视化工具
在高精度可视化工具、简化可视化工具中集成目标物可视化模块用于目标对象的展示。
新增目标级传感器融合仿真
能够将多个目标物传感器的结果进行融合输出成一路目标物信号。
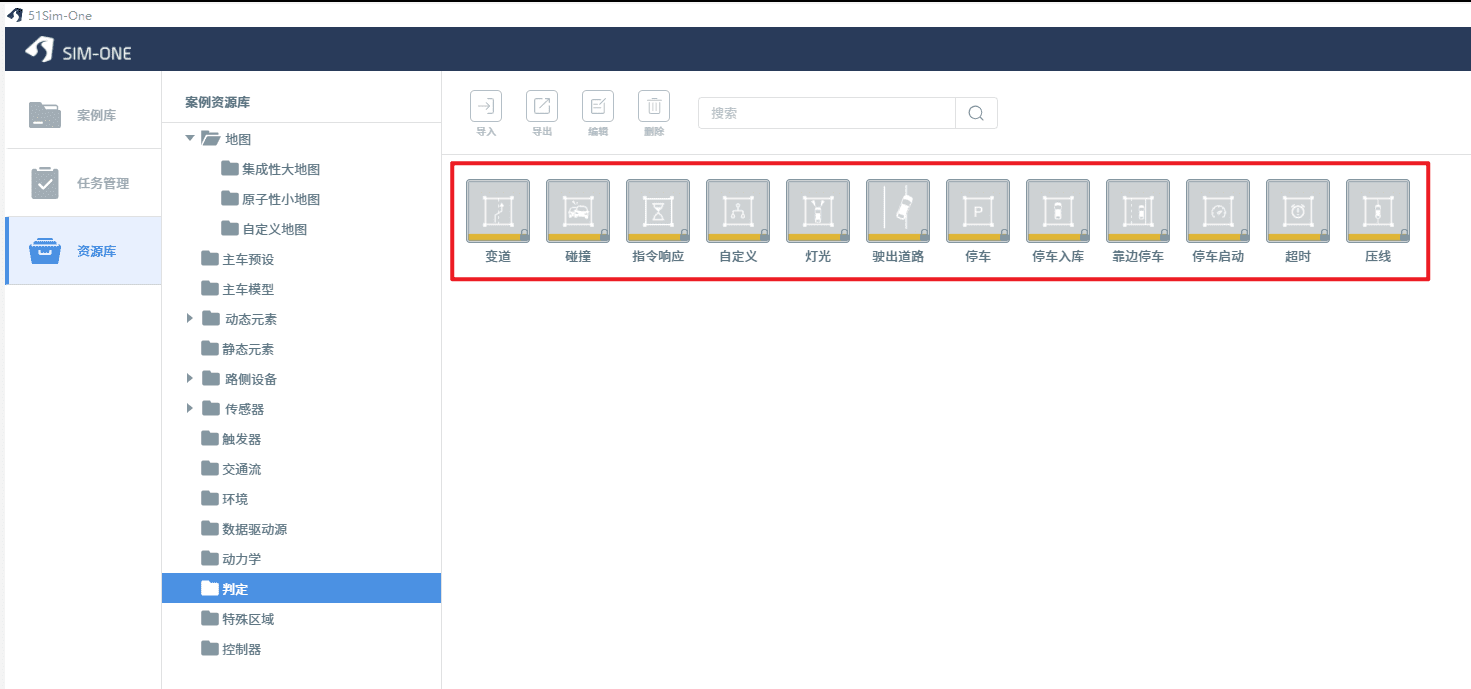
判定增强
增加4项判定条件: - 指令响应 - 灯光 - 驶出道路 - 停车入库
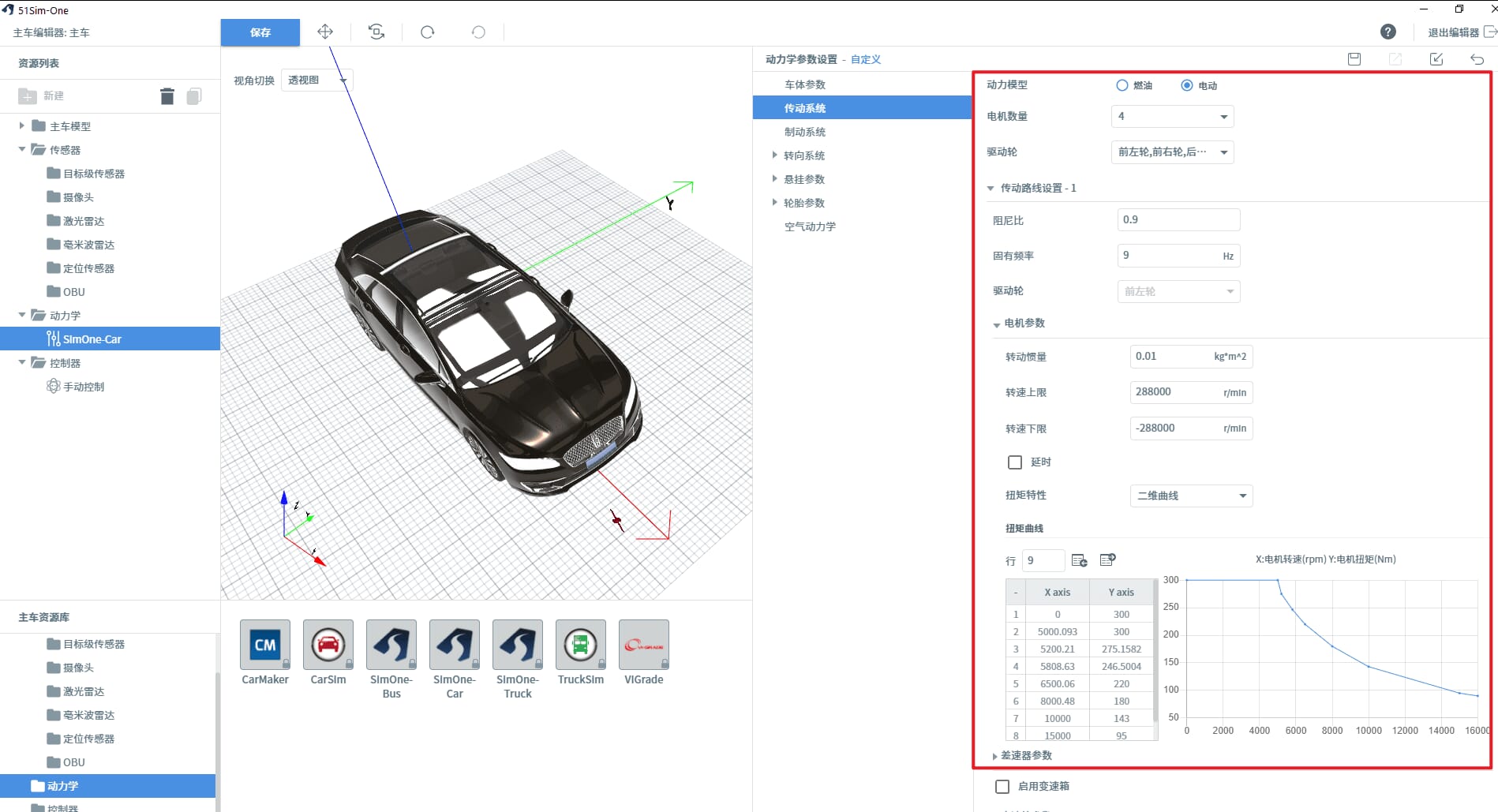
新增电动车动力学模型
增加电动车动力学模型,同时可满足carsim和carmaker动力学模型导入测试
Bug修复¶
修复数据驱动案例重采样失败的问题。
修复原子场景和高精地图不匹配的问题。
修复个别原子场景亮度过低的问题。
修复回放案例无法添加路侧设备的问题。
修复场景编辑器无法显示停车位的问题。
修复高质量可视化工具中行人包围盒闪烁的问题。
修复一键启动Simulink可能失败的问题。
修复测试报告字段显示不全的问题。
修复场景编辑器中地图偏移的问题。
修复部分静态元素在可视化工具中显示为对手车的问题。
常见问题¶
安装使用准备
安装SimOne前,你需要准备好加密狗,SimOne文件,vs2017(计算机需提前安装好)
安装过程
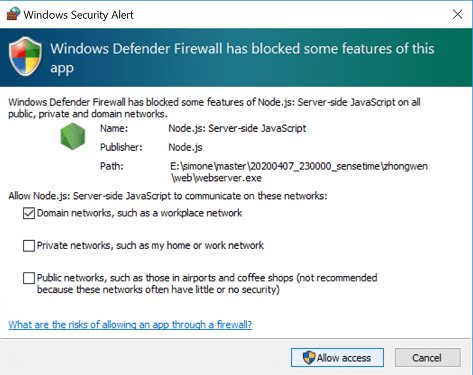
首先需要将加密狗先插电脑上,再安装驱动,插入狗会自动启动驱动程序,你只需点击下一步即可完成安装。接着打开文件夹release-devE运行setup(第一次安装用,以后都不需要),可能会显示你的配置不够,可以暂时忽略,输入Y安装成功即可。最后点开SimOneLauncher.exe,这个时候会跳出很多关于防火墙权限的页面,都点击允许即可。不需要改ip地址,默认为127.0.0.1应该没有什么问题。
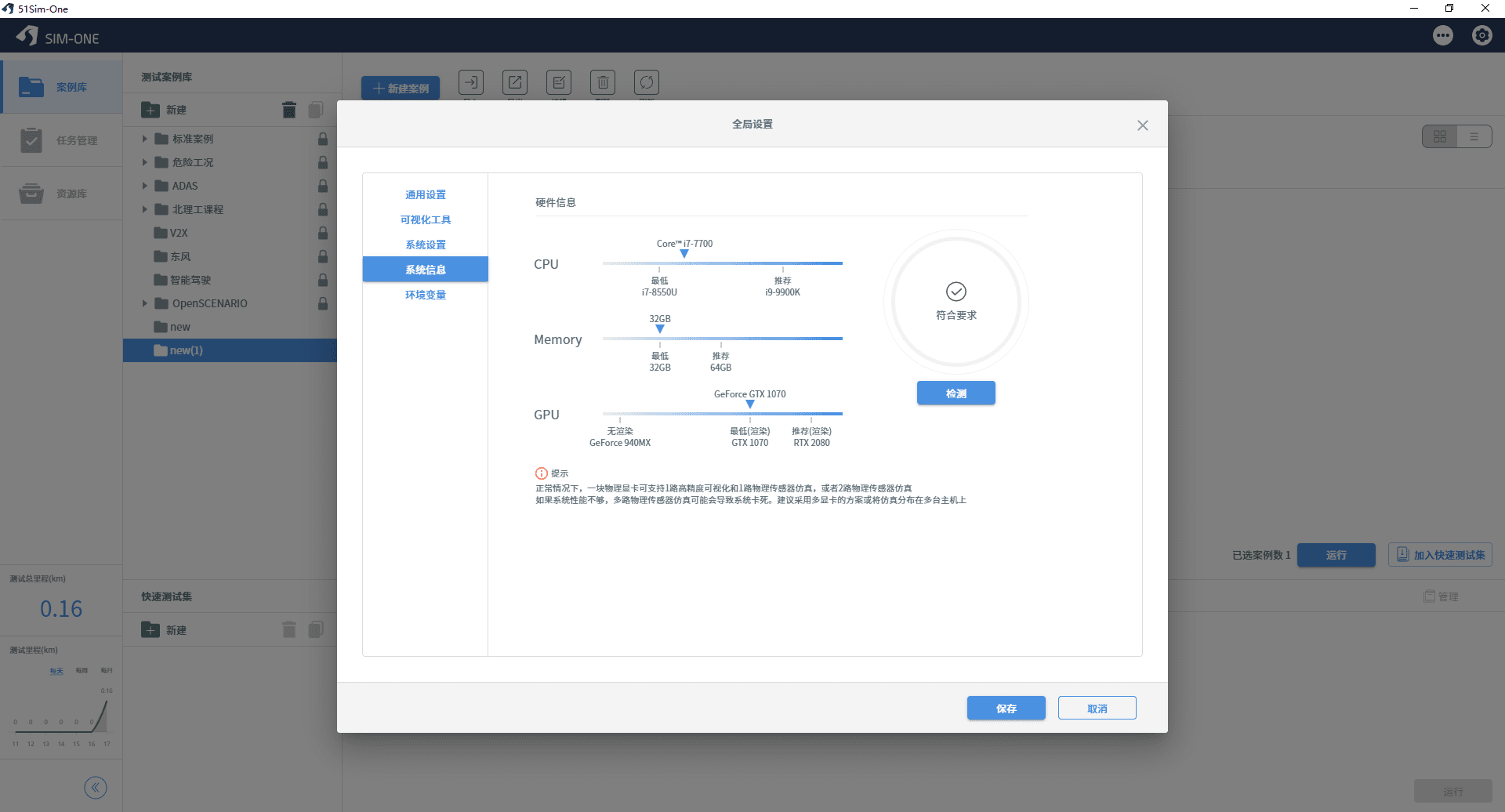
软件包解压过程,报PAK错误
解决方法:此错误是因为系统性能差,偶发性错误,请检查硬件配置是否满足SimOne最低标准,或者当前系统是否有正在大量读写硬盘的操作,比如大文件复制等
启动SimOne Launcher,报CodeMeter许可证错误
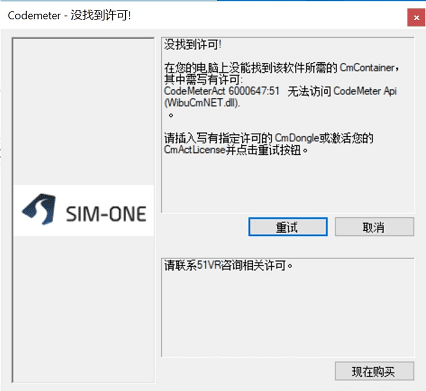
解决方法:此错误是因为 Codemeter运行时 未安装,Codemeter是SimOne选取的加密解决方案
请依照安装U盘目录,用户手册内(加密狗使用手册.pdf),安装正确的CodeMeter运行时程序(CodeMeterRuntime64.msi)
同时此手册也列举了在使用加密狗过程中可能遇到的其他问题,可供您参考。
双击SimOne Launcher,报非法字符错误
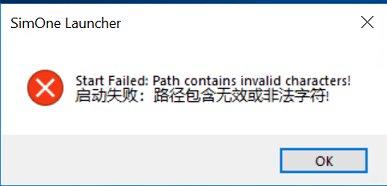
解决方法:此错误是因为 SimOne所在的目录包含空格或者中文等,请保证路径不含这些字符
解压软件后,运行好launcher,弹出SimOne管理界面后,直接运行默认案例,但是案例一直在待运行?
解决方法:由于内置案例会默认调用Apollo为控制系统的主车,所以在运行内置案例前必须先安装好Apollo并正确配置以及运行。如果没有安装Apollo,可以在运行内置案例的时候,选择运行方式为手动默认驾驶方式,这样可以正常运行案例,UE Observer运行窗口也会正常启动,用户需要通过键盘来控制主车运行。
双击start SimOne,页面反复重启或者一直转圈
解决方法:
1.检查路径是否偏长
2.检查nodejs是否安装,安装文件存在于release-dev/Extras,安装后需要重启
3.检查release-dev/Web/WebServer.exe是否存在,目前发现非7z解压,路径比较长的是否似乎会漏掉
双击start SimOne,Powershell窗口未弹出,软件无法启动
解决方法:此错误是因为用户机器安装了杀毒软件,会把SimOne守护进程误认为是病毒,需要退出所有杀毒软件,同时Windows防火墙弹出的窗口都点允许访问。
Apollo启动失败
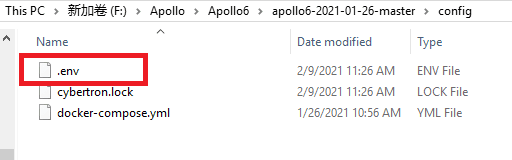
解决方法:此错误原因可能较为复杂,常见原因为ENV设置不正确。请修改.env文件内SimOne程序所在机器的IP,端口等,再点击start.bat 文件。
UE Observer窗口能够正常启动,但是画面一片空白

解决方法:Config配置文件中多了些空格,需要修改配置文件,如果出现这种情况,请联系技术支持修改。
运行案例后UE Observer无法启动
解决方法:
如果您运行的是手动运行案例,请检查是否安装UE依赖的第三方库,可以在extra目录下找到UE4PrereqSetup_x64.exe。
如果您使用Apollo驾驶的方式运行案例,请检查是否安装配置好Apollo包,是否按照用户手册要求在config里正确配置了IP地址。
Ubuntu版本无法运行案例
解决方法:请先检查电脑主机配置,显卡是否符合要求。
如何接入用户自己的算法
解决方法:举例如下,如果我们用ros topic, 我们有如下Sample演示代码,提取传感器数据然后发到ros topic。 SimOne API提取传感器数据,例如点云,障碍物,相机,超声波等。然后发送到ros topic, 然后您这边的算法从rostopic 接受传感器数据,算法进行融合处理这些数据后再计算出来主车的油门,方向盘,刹车信息,调用SimOne API driver API 来控制主车。在产品更目录有一个sdk目录。然后网站启动后,有一个文档服务器,里面可以查阅各种api和范例代码。
平台文档无法打开
解决方法:没有安装node导致无法执行StartWebServer.bat的相关命令;安装nodejs
运行sample无法打开ue,一直等待测试
解决方法:打开config,勾选cpu_node2,然后重启SimOne即可
Setup.bat运行闪退
解决方法:
查看自己jdk是否安装并配置好环境变量
机器上无论什么bat都无法运行,先检查C:/WINDOWS/system32/wbem是否存在然后看看path是否有这个路径;
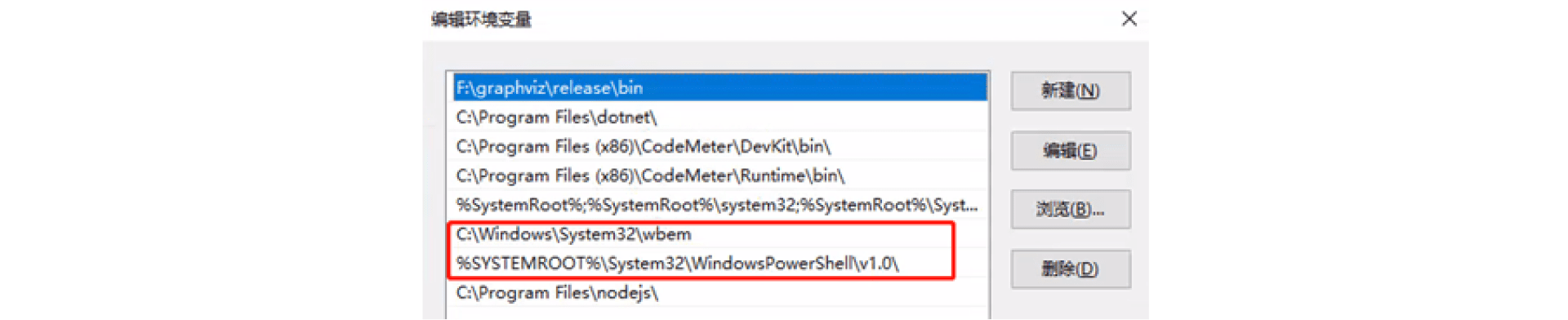
另外有些bat执行需要管理员权限
启动Launcher,WebServer无法启动
web下显示powershell不是内部或外部命令,也不是可运行的程序
解决方法:添加powershell的环境变量—–%SYSTEMROOT%/System32/WindowsPowerShell/v1.0/

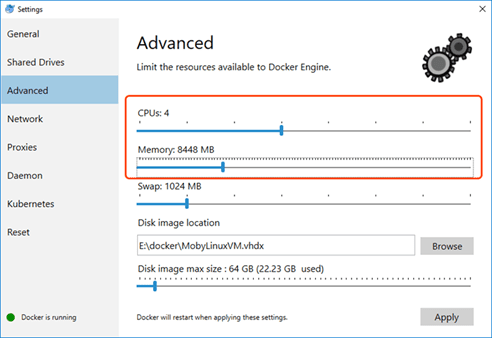
内置案例可以运行,但是算法主车左右摇晃走S形
解决方法:此问题是因为算法docker对系统分配的CPU和Memory有一定要求所致,如果低配不满足,算法会产生延迟等不可控因素,解决方案:请分配给Apollo有4核cpu和8GB内存至少,另外单机版本,主车不建议添加多于一个传感器。
在未能成功运行任务A时(任务A遗留于正在测试列表),用户新建任务B,此时任务列表堆积若干测试任务,但却无法继续测试
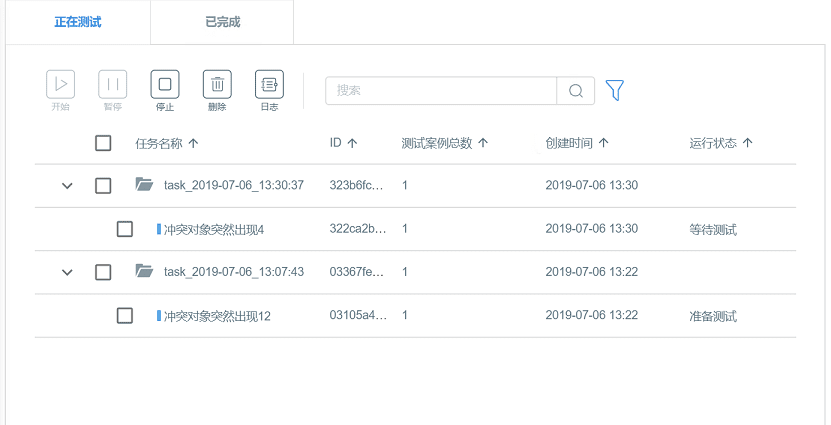
此错误是因为SimOne对多任务批量运行时,如果上一次任务设置不恰当会处于等待状态。
解决方法:手动停止或删除问题任务,后续任务将继续运行。

一键启动simulink开发环境相关
若电脑上安装有多个不同版本的Matlab,则2019a及以上的版本有更高的优先级;若多个版本同属于2019a以下或同属于2019a以上,则环境变量Path中先出现的那个有更高的优先级。
若出现“一键启动simulink开发环境失败,错误类型:app.api.error.code.30000X”,则根据错误码可尝试以下操作:
300001、300002 检查注册表中Matlab的路径是否存在和正确
300003 检查[期望使用的Matlab版本的安装路径]/bin/win64下libeng.dll文件是否存在
300004 以下两种办法可二选一: a:用管理员权限打开期望使用的Matlab版本,输入!matlab -regserver,并等待命令运行完成 b: 用管理员权限打开命令提示符,输入cd [期望使用的Matlab版本的安装路径]/bin/win64,输入matlab /regserver并运行
300005 请检查网络环境
v1.3 版本¶
发布时间:2020-11-03
新增功能¶
系统配置
新增判定项目
新增了变道、靠边停车、停车启动、离车道线距离、偏离车道中心线等项目
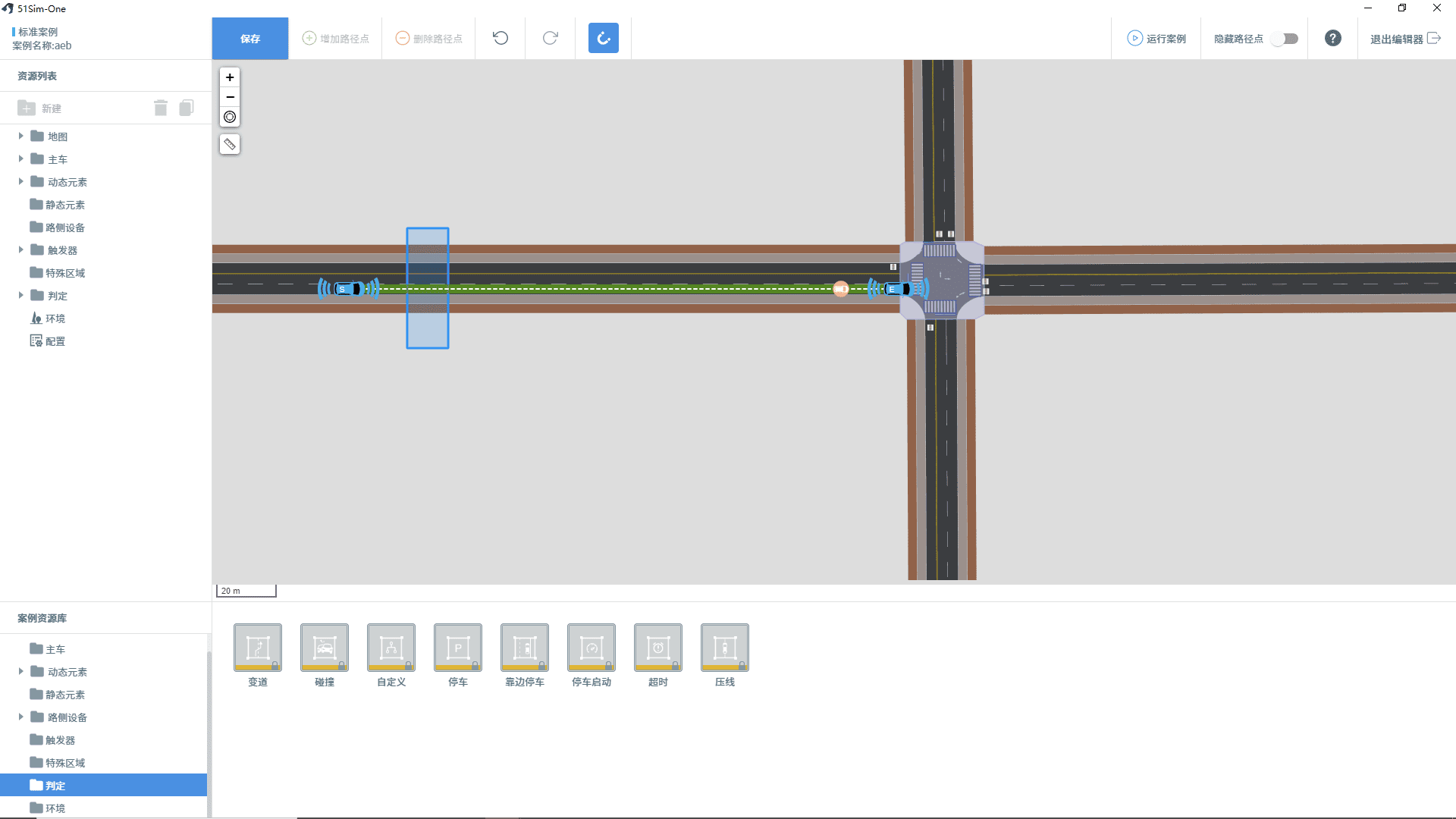
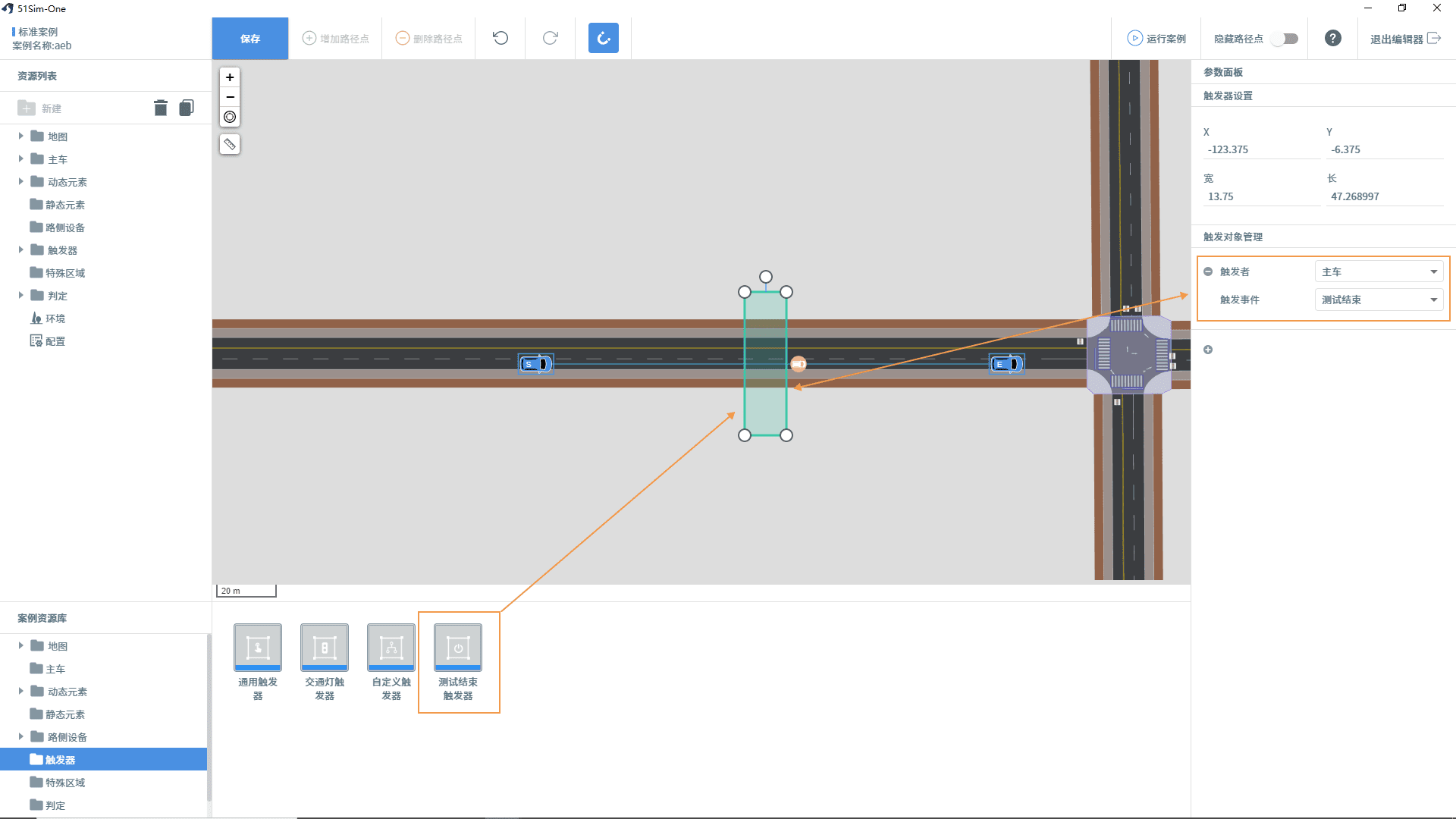
新增结束测试触发器
用户可在案例编辑器添加结束测试的触发器,当主车或其他对象达到触发条件时,系统会结束测试,若未添加该触发器,则系统默认以主车到达E点为结束条件
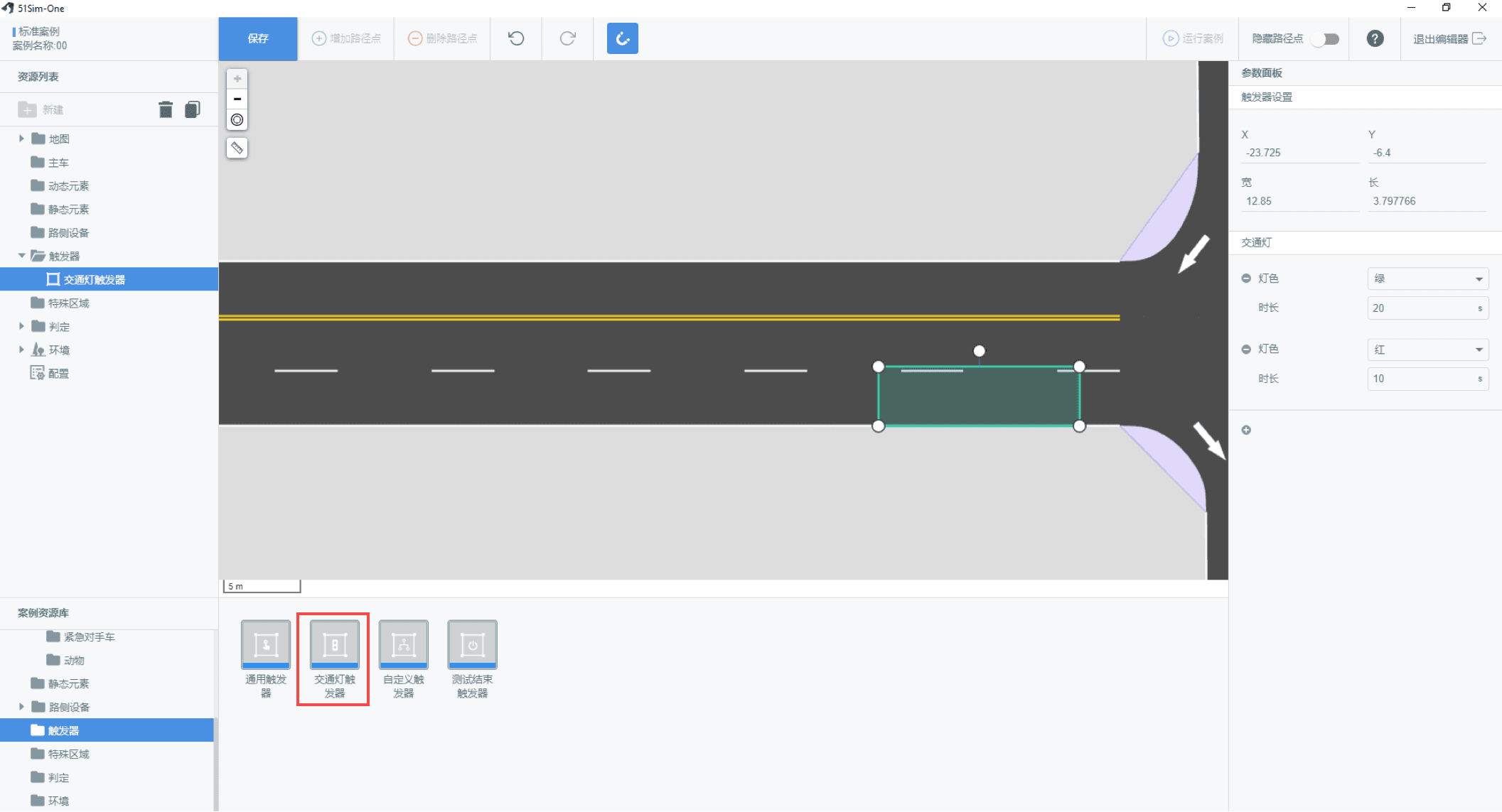
新增交通灯触发器
用户可在案例编辑器添加交通灯触发器,交通灯触发器,是用来控制路口交通灯行为的触发器,通过交通灯触发器即时介入改变指定道路对应信号灯的时序,触发结束后继续按原规则运转。
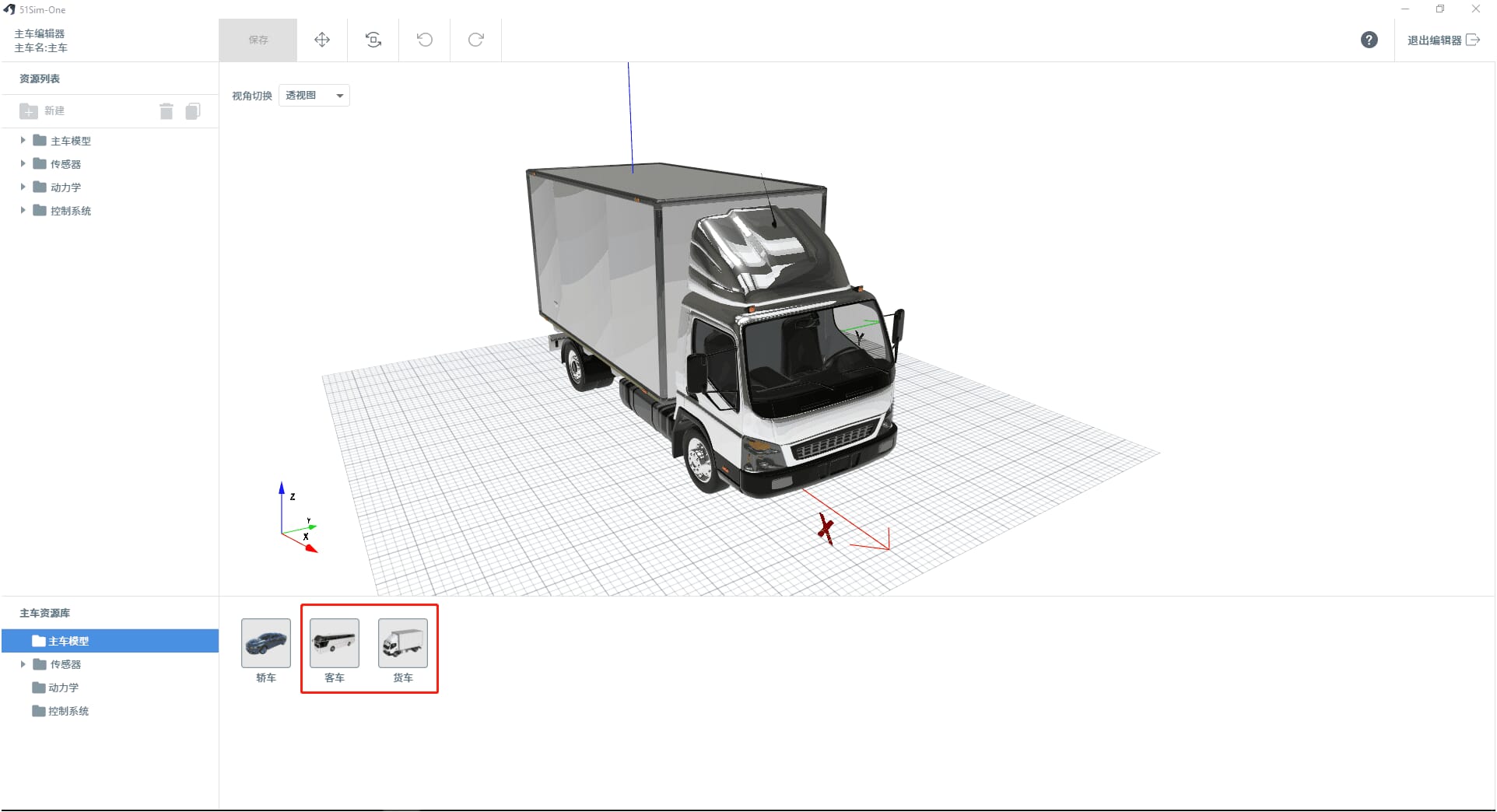
新增主车模型
全新增加2种类型的主车模型,包括货车以及大巴车。
新增内置资源
新增动态元素 – 行人:儿童、躺着的人;动物:狗;紧急对手车:警车、救护车;普通对手车:气球车;两轮车:摩托车。
新增静态元素 – 台阶、土堆、碎石块、石头

目标级传感器
增加多个目标级达传感器,用于支持用户更好地调试决策算法。 - 新增目标级激光雷达 - 新增目标级摄像头 - 新增理想传感器

V2X传感器和案例的相关配置
主车传感器增加了OBU(车载单元)设备,用于支持V2X相关的案例。路侧设备中增加了RSU设备,用于支持V2X案例相关的测试场景。同时,对手车也可配置OBU,行人和非机动车也可配置是否支持V2X。
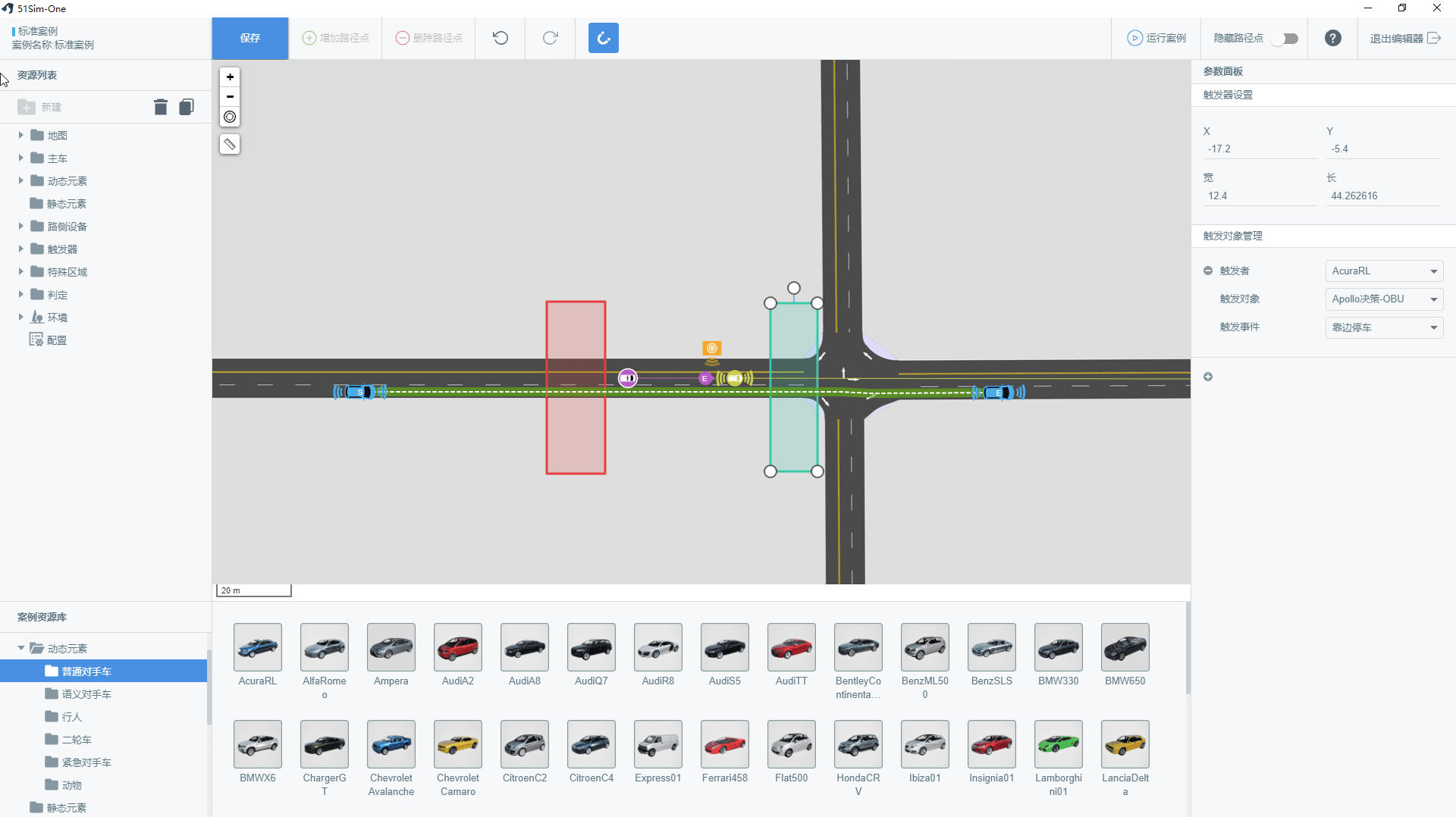
增加了自定义的触发者和触发器,方便用户构建V2X测试场景。
增加了紧急对手车,用于支持V2X测试场景。
增加了特殊区域,包括危险区域和拥堵区域,用于构建V2X测试场景。
Observer新增V2X消息及通信状态可视化
web/ue Observer均新增V2X消息可视化支持,包括行人、对手车、自行车、道路标志、拥堵、紧急车辆、交通灯等几类信息
OBU及RSU通信状态可视化展示

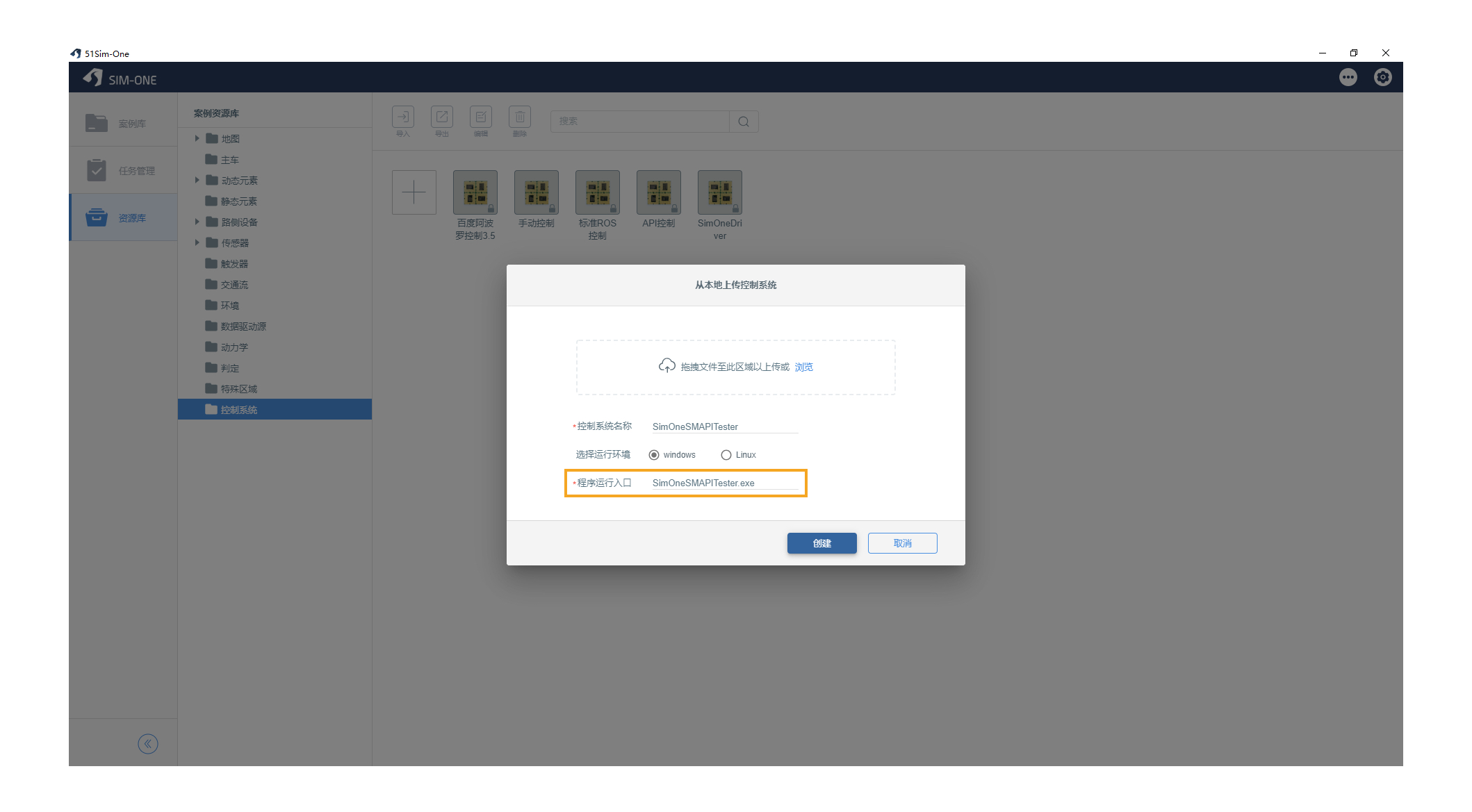
支持本地算法上传
用户可在资源库-控制系统文件夹上传打包成可执行程序的算法文件
一键启动simulink开发环境
用户可在主车编辑器,从主车控制系统中安装API控制后,在右侧属性面板点击“一键启动simulink开发环境”按钮,SimOne将启动matlab,并配置好开发环境,用户可在此文件编写调试算法

v1.2 版本¶
发布时间:2020-07-01
新增功能¶
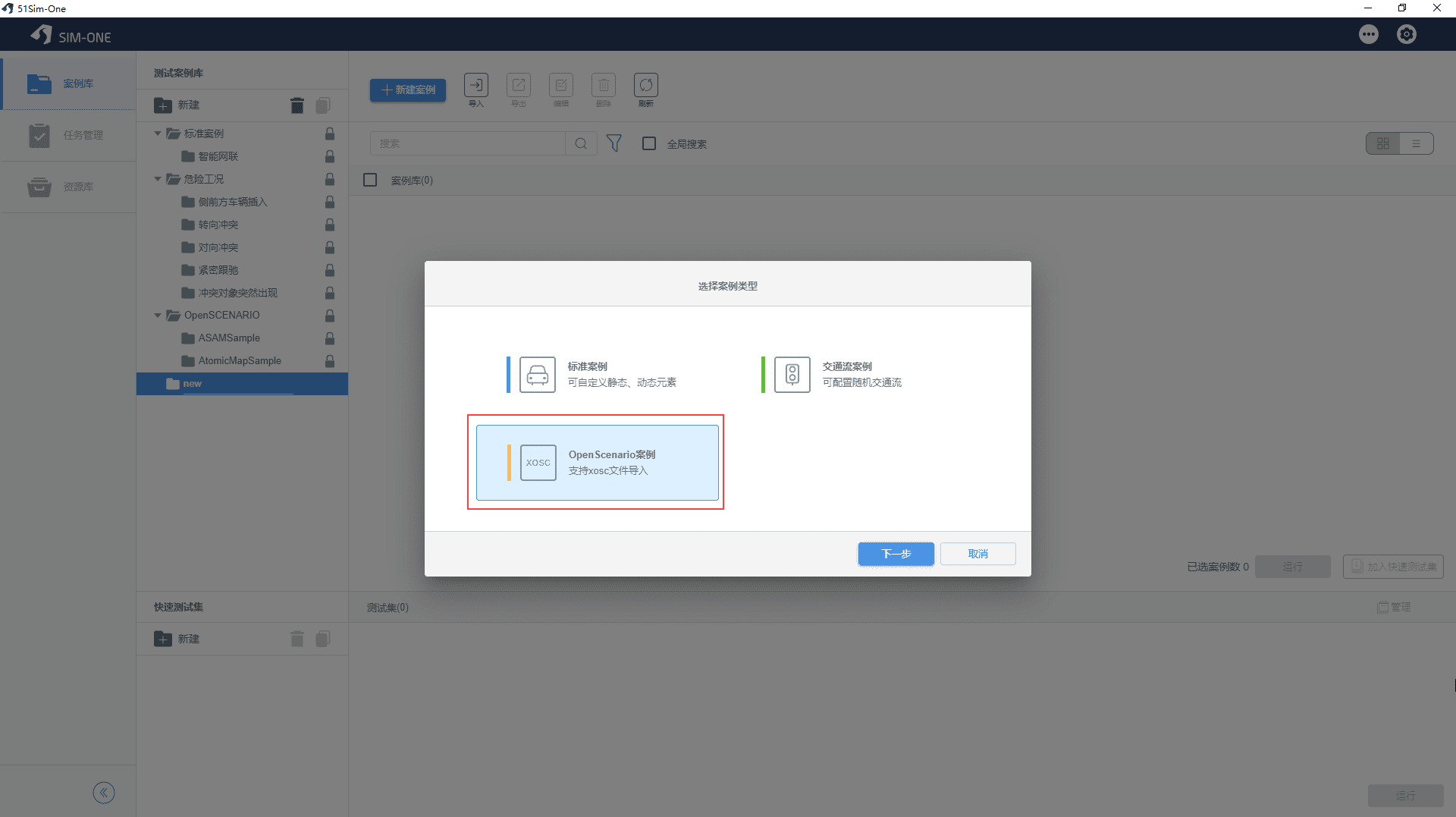
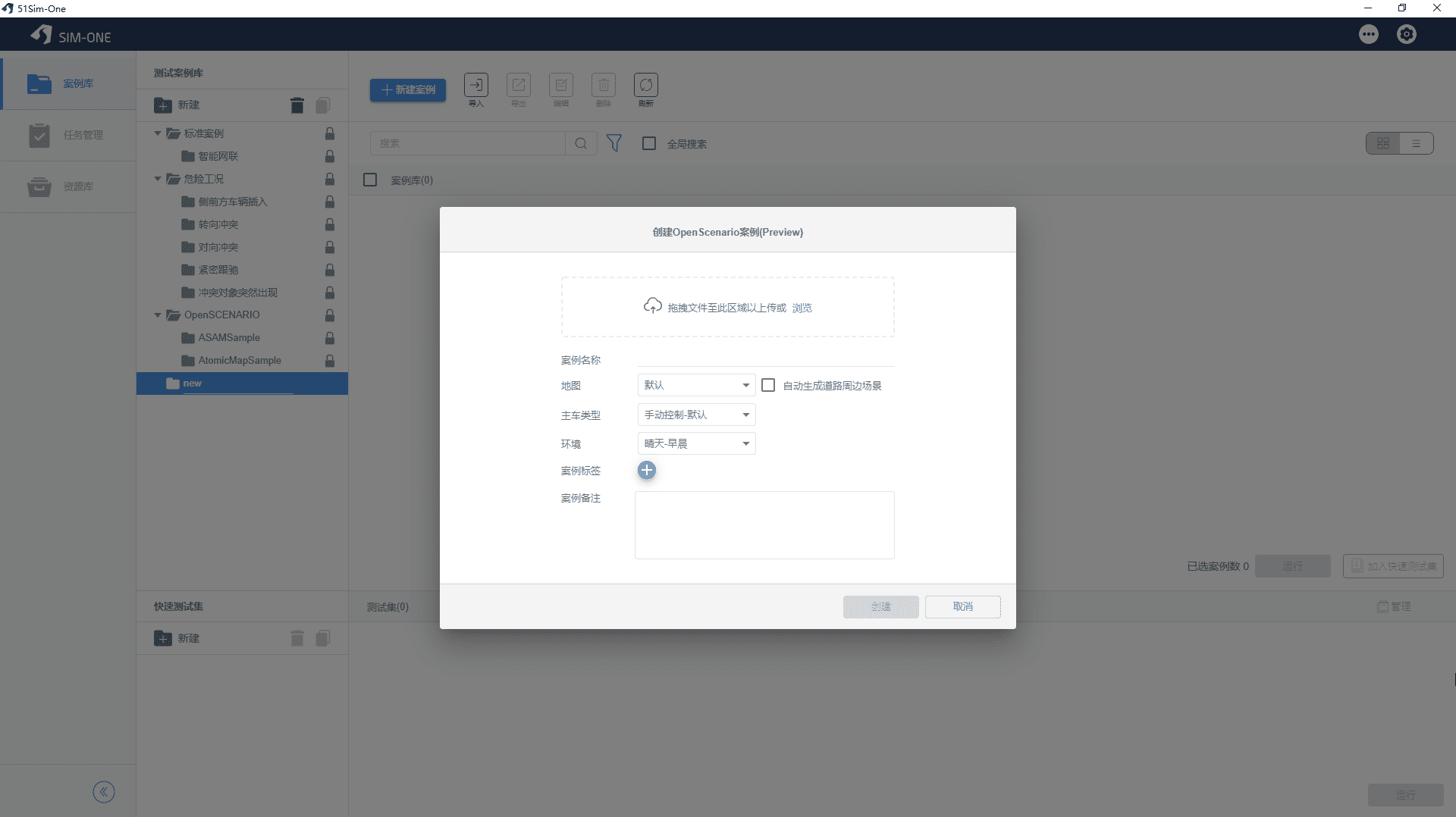
OpenSceanrio播放器
51 Sim-One v1.2中增加了OpenSceanrio案例,可支持用户播放OpenScenario案例。OpenScenario描述了驱动仿真应用程序中的动态内容,实现智能驾驶动态场景的标准化描述。用户也可导入OpenSceanrio文件创建一个OpenSceanrio案例;此外,用户可修改OpenScenario案例的地图、主车类型、环境、标签和备注
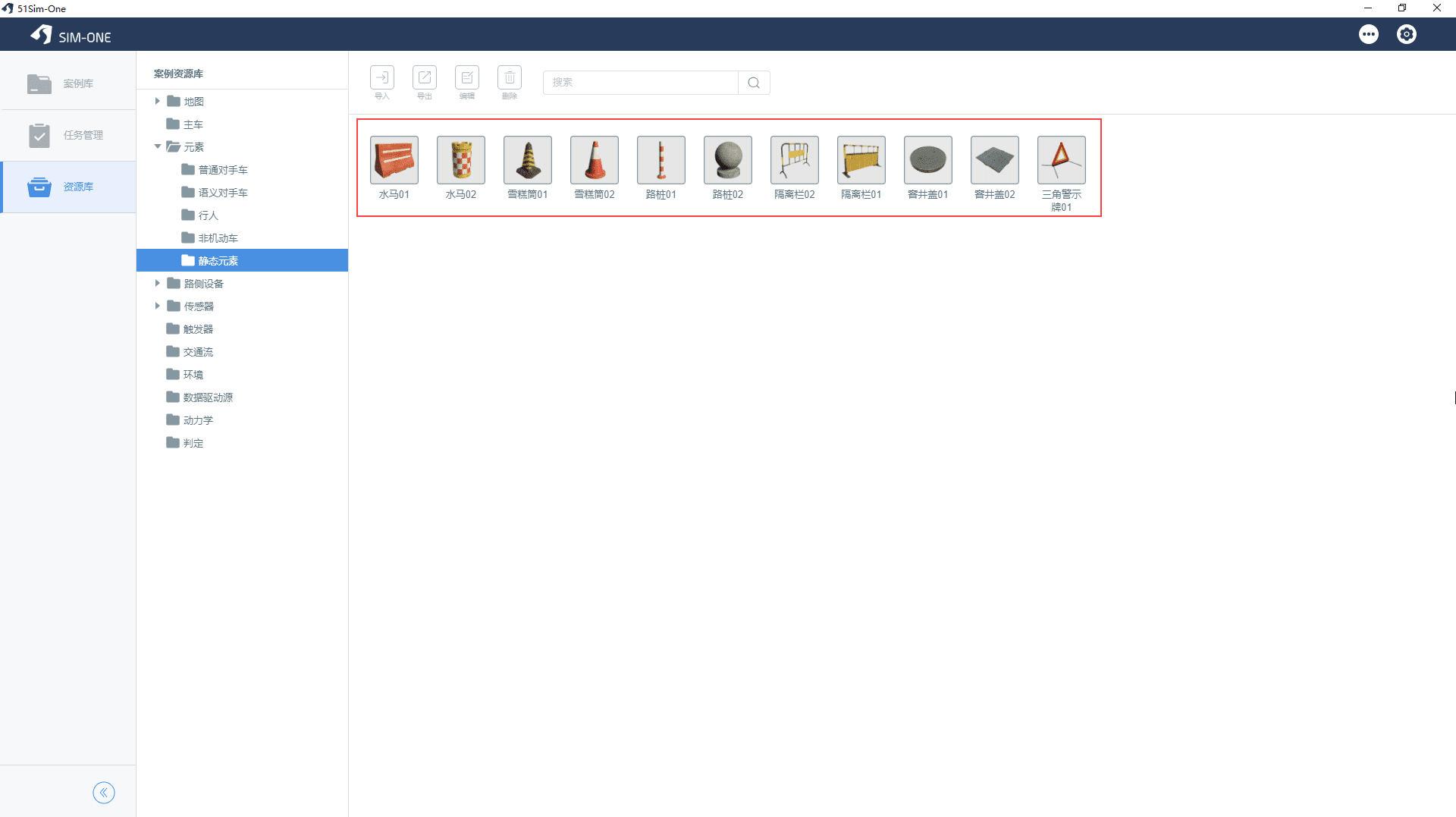
静态障碍物
51 Sim-One v1.2的资源库元素中增加了静态障碍物元素,包括水马、雪糕筒、路桩、隔离栏、窨井盖、三角警示牌,用户可在案例编辑器里随意放置障碍物用于仿真测试

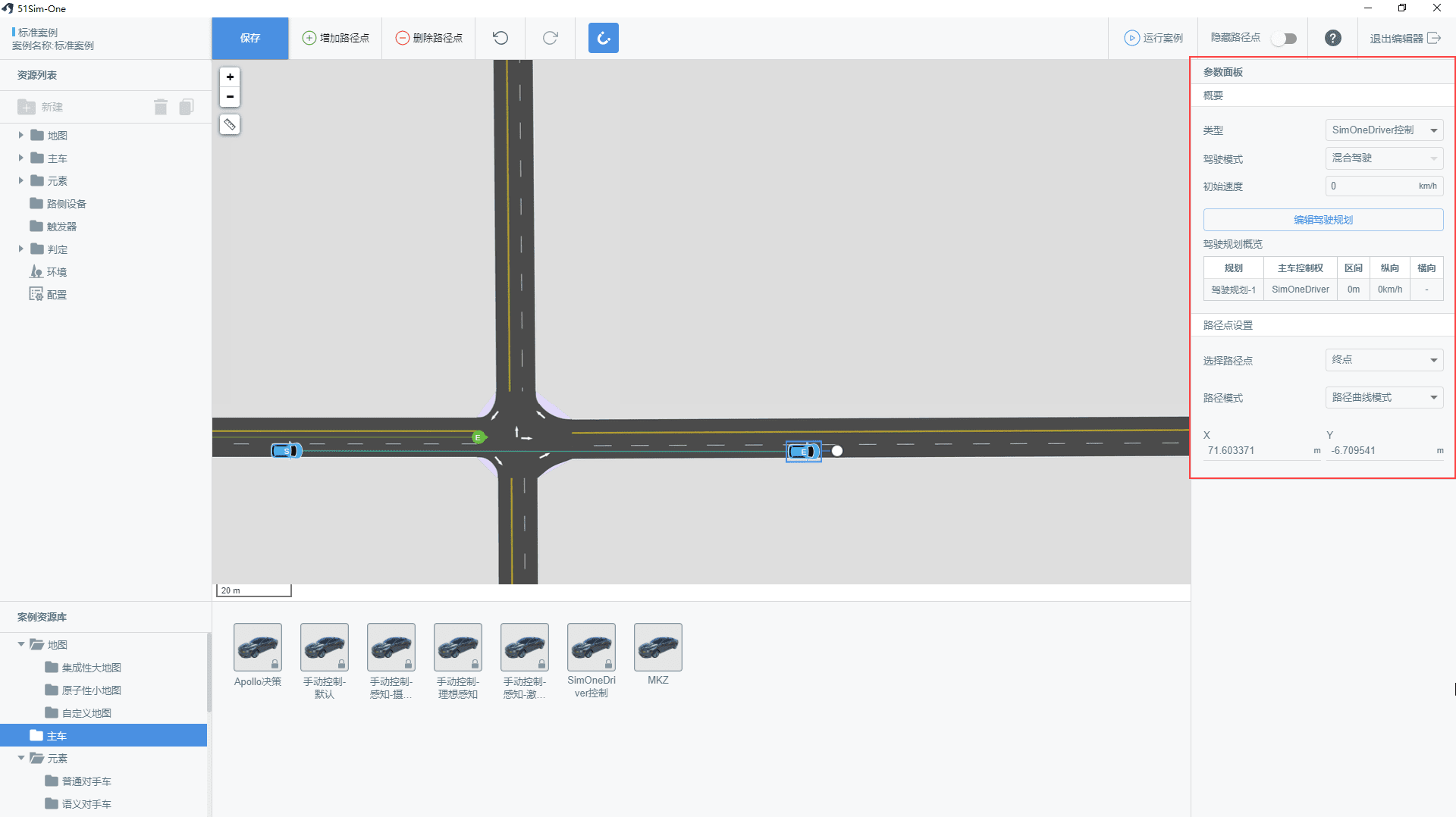
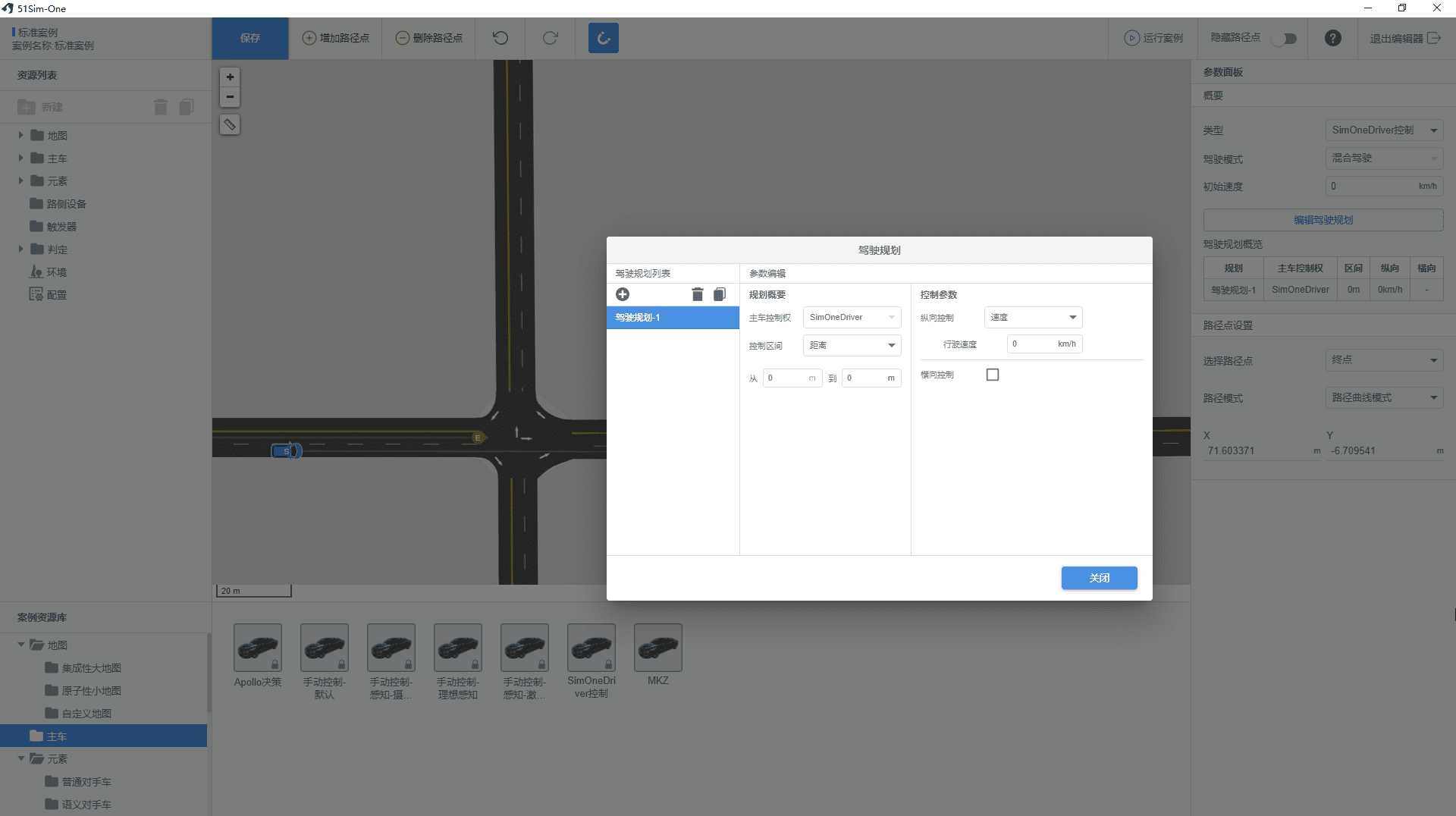
SimOneDriver
SimOneDriver是根据用户设置的驾驶规划来驾驶主车的模块,可联合Simulink测试ADAS算法,或者将主车开至所需工况后交由自动驾驶系统接管
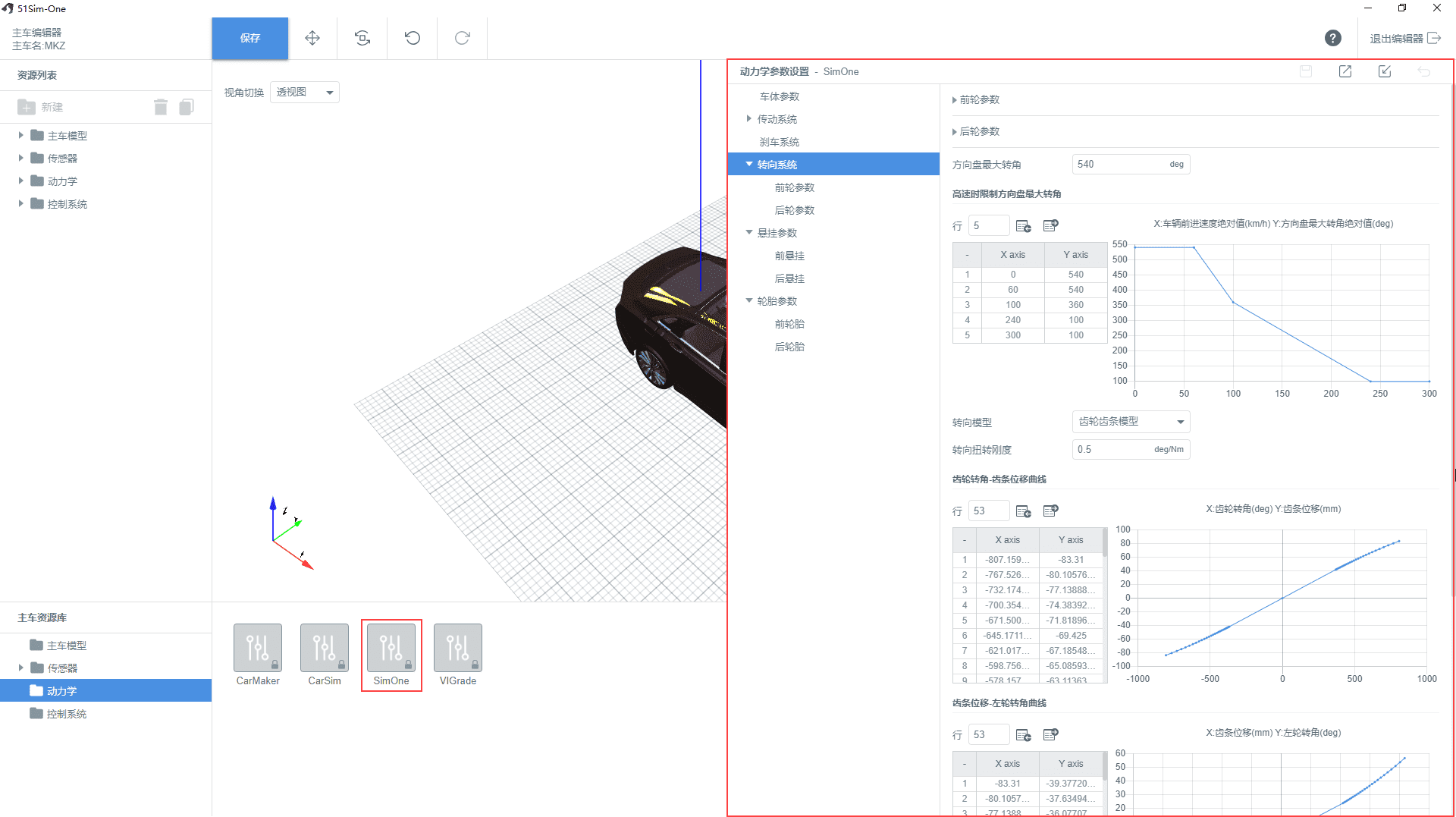
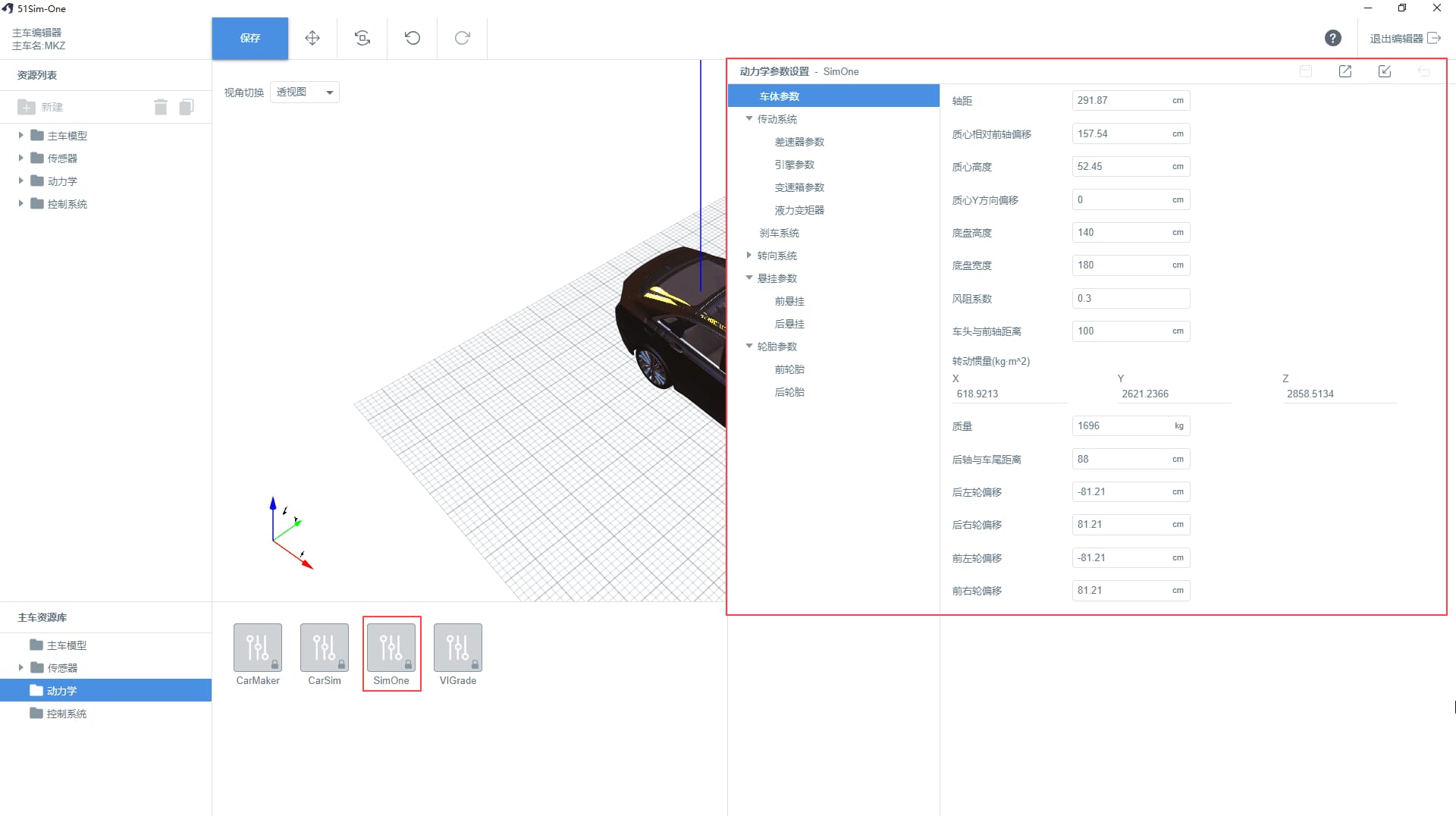
独立动力学模块
51 Sim-One v1.2中改进了独立动力学模块SimOne(之前为SrVehicles),更友好的用户界面和操作方式方便用户可以快速轻量地设置动力学参数,同时支持动力学参数的导入导出和预设存储,更好地用于后续的算法迭代测试、传感器仿真测试等
案例判定增强
增加了案例判定部分,用户可以从多个维度包括停车、碰撞、超时和自定义条件对被测算法系统进行测试

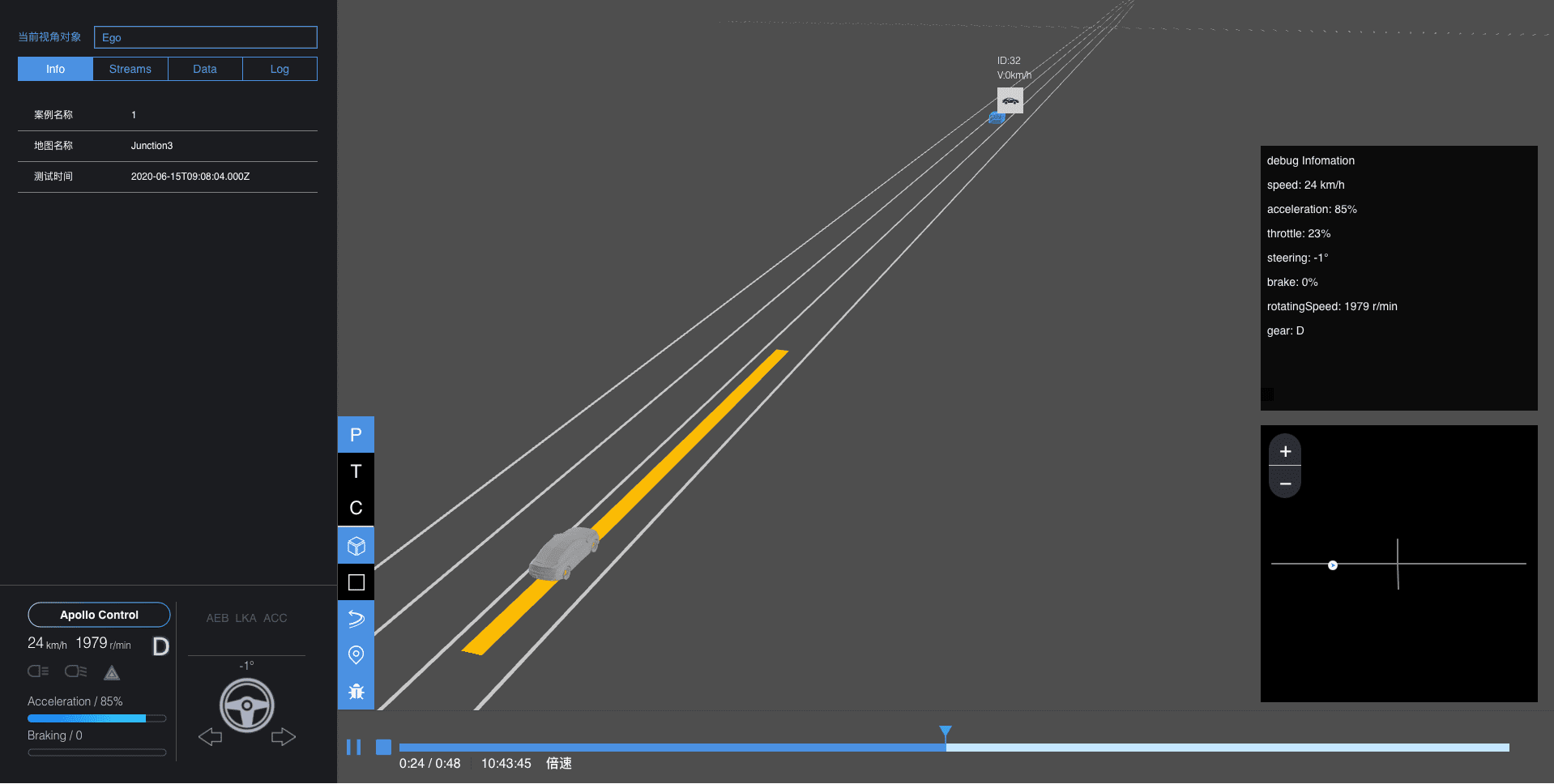
Web Observer
基于浏览器的案例测试可视化方式,相对UE Observer更为轻量化,适合云端版用户,本地版用户也可在config中修改设置切换UE Observer和Web Observer
v1.1 版本¶
发布时间:2020-01-22
新增功能¶
数据驱动案例
当前SimOne v1.0版本中的案例类型包括标准案例和交通流案例,SimOne v1.1中增加了数据驱动型案例。用户可通过SimOne平台可回放采集的原始数据,保证数据的完全精准性,同时可将原始数据通过转化重建为数据驱动型案例用于算法测试等。此部分包括原始数据的回放仿真、数据的转化、重采样和数据驱动型案例的编辑。
路网运行时
当前SimOne v1.0版本中用户放置主车或元素位置时不受限制,SimOne v1.1中增加了根据地图服务的路网运行时。用户编辑主车、对手车等元素时,系统会限制用户放置在路网合适的位置生成可运行的路径,提升运行案例的成功率
环境模型增加了25种预设
通过对用户常用环境参数模型的预设储存,用户可快捷方便地应用预设好的环境资源,方便案例编辑与测试。
传感器增强
传感器参数可另存为预设;传感器中的摄像头、激光雷达、毫米波雷达、超声波雷达、GPS&IMU、完美传感器都增加了部分参数;完美定位传感器不再需要。
控制系统
增加了共享内存,标准ROS控制(API补强)。
案例库
案例库增加了全局搜索案例的功能。
优化案例编辑操作
案例参与者选择支持图片预览和搜索,用户可轻松定义主车及各类元素的自定义路径。
Observer改进增强
重构了观察窗口的布局,新增了小地图,优化了显示控件,能够展示更多和开发相关的元素,方便开发者监控测试过程。
v1.1 SP1 版本¶
发布时间:2020-03-24
新增功能¶
OpenDRIVE自动生成复杂场景
对于用户导入系统的OpenDRIVE地图,现在可以在案例编辑器里通过调整参数灵活地配置场景中的道路周边元素。用户可以非常轻松地通过OpenDRIVE来自动生成复杂的仿真场景。
新增路侧设备
在案例编辑器中提供添加摄像头和激光雷达的能力。该功能可支持用户从多个观察角度更好地设定路侧传感器的摆放位置,实现路侧设备的感知结果输出,用于路侧设备识别算法训练与部署评估。增加路侧设备资源,用户通过V2X天线与路侧传感器的融合,对车路协同应用场景提供辅助计算、数据存储等支持。
v1.0 版本¶
发布时间:2019-08-29
新增功能¶
内置高真实感测试场景
6个原子地图场景
2个大地图场景
几十种不同种类和车型对手车模型。
简单行人模型、自行车模型和静态元素。
案例库
内置100多个真实采集的危险工况案例。
案例数据库,案例管理、新建、删除、编辑。按地图,名字,类型的过滤,方便筛查需要的案例。
快速测试集,通过测试集的方式来快速管理分组测试案例。
单个案例测试和案例批量测试流程。
场景的自动生成
由OpenRIVE格式高精地图自动生成仿真场景的流程,生成场景包含可见路面、标线、标牌、交通信号灯,路灯,随机绿化,建筑等。
案例编辑
基于Web的案例编辑器,支持在任意OpenDrive地图上编辑主车的路径规划,创建对手机动车、非机动车、行人、编辑其轨迹和触发方式。
交通流测试,支持制定不同密度和行为的机动车、非机动车、行人混合交通流测试。
资源库/主车编辑器 - 基于Web的测试资源管理器,用来管理测试用地图、主车配置、对手车、测试评价标准等 - 基于Web的主车编辑器,方便配置传感器、动力学、控制系统。
测试运行,评价,报告,记录与回放
可以批量运行多个案例测试,可以启动、停止、随时接入可视化端进行观察等。
可以自定义添加多种测试评价标准,包括是否压实线、双黄线、停止线、碰撞、违反限速标示以及是否到达终点、是否超时等。
可以生成下载测试评价报告,依据用户设定测试评价标准对测试完成情况进行评价。
支持对测试过程中的数据进行记录,并在需要时进行回放。
传感器仿真
完美传感器
摄像头仿真
激光雷达仿真
毫米波雷达仿真
超声波雷达仿真
GPS&IMU仿真
动力学仿真
自研动力学仿真引擎的支持。
接入CarSim的支持。
物理仿真引擎
无渲染物理仿真节点,支持以一定频率进行仿真并更新主车和对手车的姿态数据,并对可能出现的物理碰撞,触发进行解算。
可视化端
案例运行时可以选择接入可视化端对执行情况进行观察,案例回放时也可以接入可视化端对已结束运行案例的运行情况进行检查。
支持可视化方式显示语义地图,障碍物,轨迹规划,点云等。支持第三人称视角真实感渲染可视化,摄像头视角并可切换RGB,深度,分割图。支持各种主车参数随时间变化的曲线图。
数据接口
多种常用数据接口的支持,如ROS,LCM,Matlab等。
可根据用户需要对接口进行适配,编辑。
可以选择从感知系统接入自动驾驶系统,也可以选择跳过感知系统从决策系统接入自动驾驶系统。
可以选择从决策系统接出轨迹进行完美控制仿真,也可以选择接入控制系统,通过控制系统返回的油门,刹车,方向盘的数据进行仿真控制。
多主车互动
支持在一个仿真场景内同时接入多辆主车,可以为自动驾驶车,也可以使用手动控制。
可以为主车接入方向盘踏板,或者驾驶模拟器进行控制。
虚拟数据集的生成
可以在仿真过程中同步将RGB图、深度图、分割图、实例图和目标物检测真值保存到文件,用来训练视觉识别和图像分割算法。
可以在仿真过程中同步将点云和目标物检测真值保存到文件,用来训练点云识别和分割算法。