v2.0 版本
发布时间:2021-03-11
新增功能
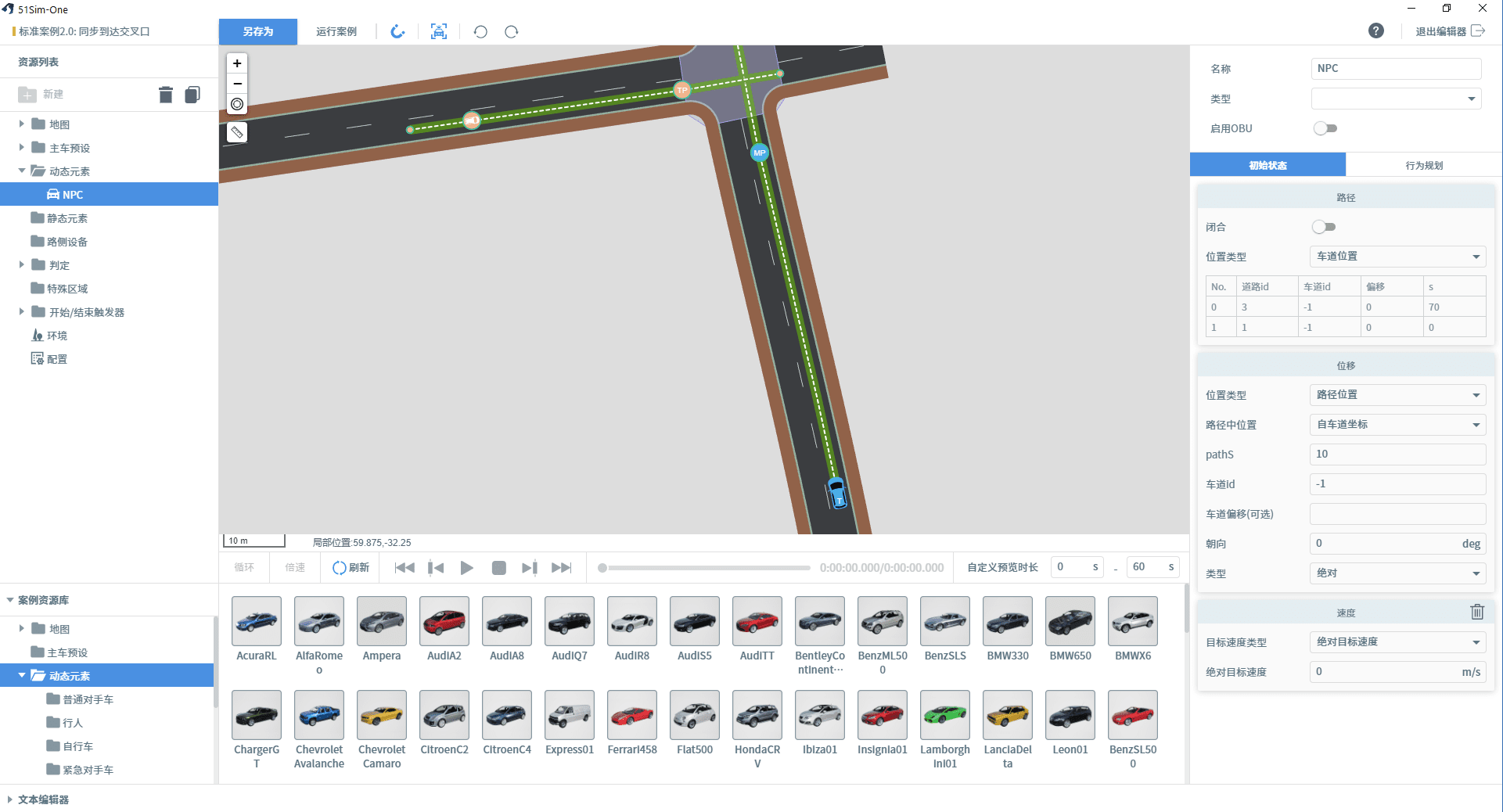
场景编辑器2.0
场景编辑器2.0全面支持OpenSCENARIO 1.0的标准。 - 支持静态、动态对象的摆放和配置。 - 支持交互式的方式来编辑Event、Action、Condition等场景要素。 - 自带语法高亮的OpenSCENARIO文本编辑器。 - 支持在案例编辑器内预览调试场景编辑成果。 - 支持路网服务,多种position类型可切换。 - 支持接入用户算法及混合驾驶测试模式。
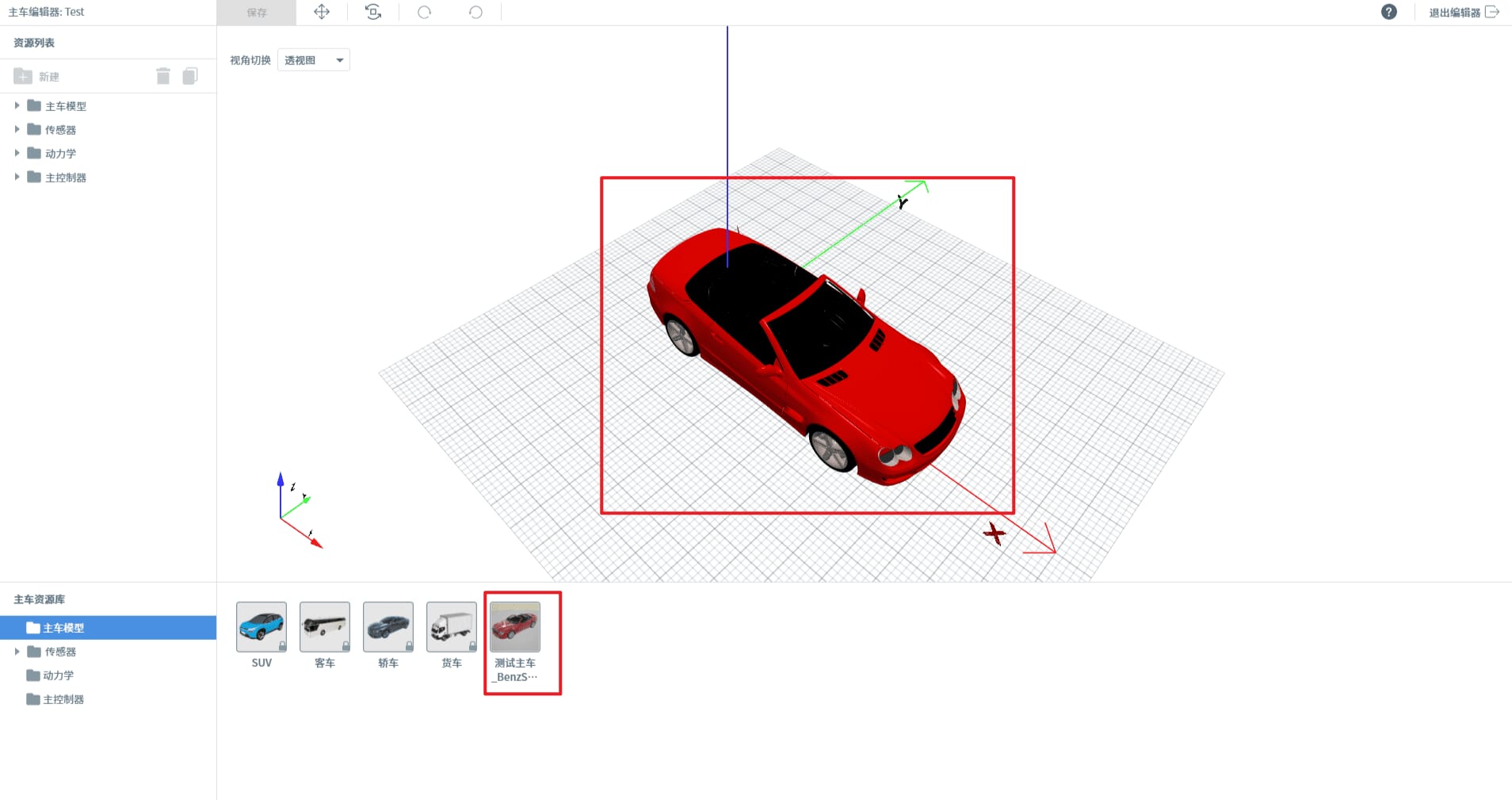
支持导入自定义主车模型
支持用户导入自定义的主车模型用于仿真测试。
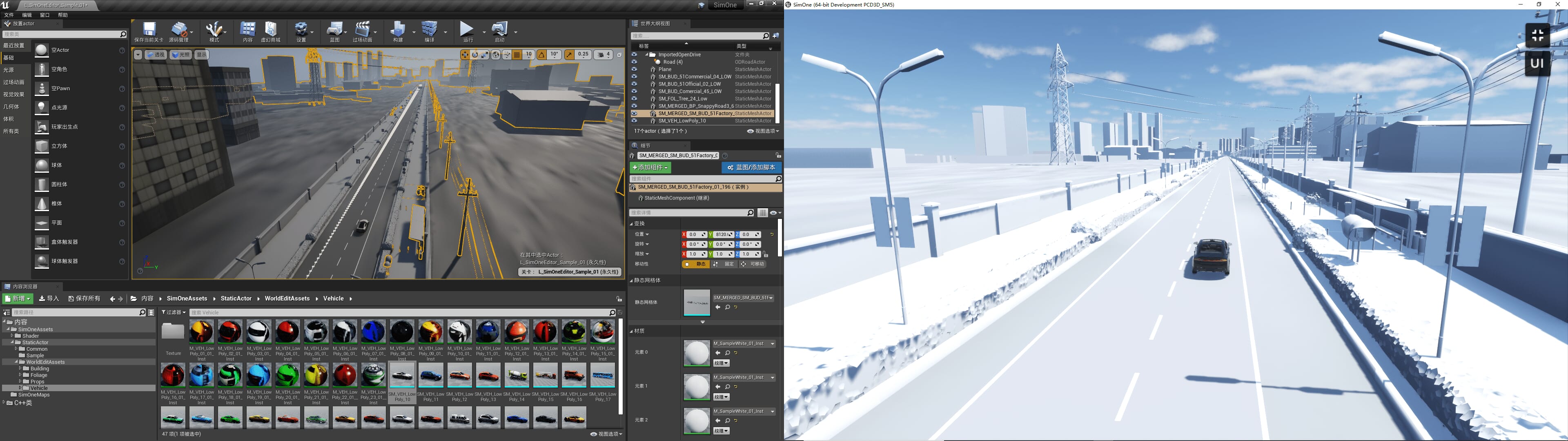
支持导入自定义场景
支持用户导入自定义UE场景用于仿真测试。
新增原子地图
新增2张停车场原子地图: - 地下停车场 - 地面停车场
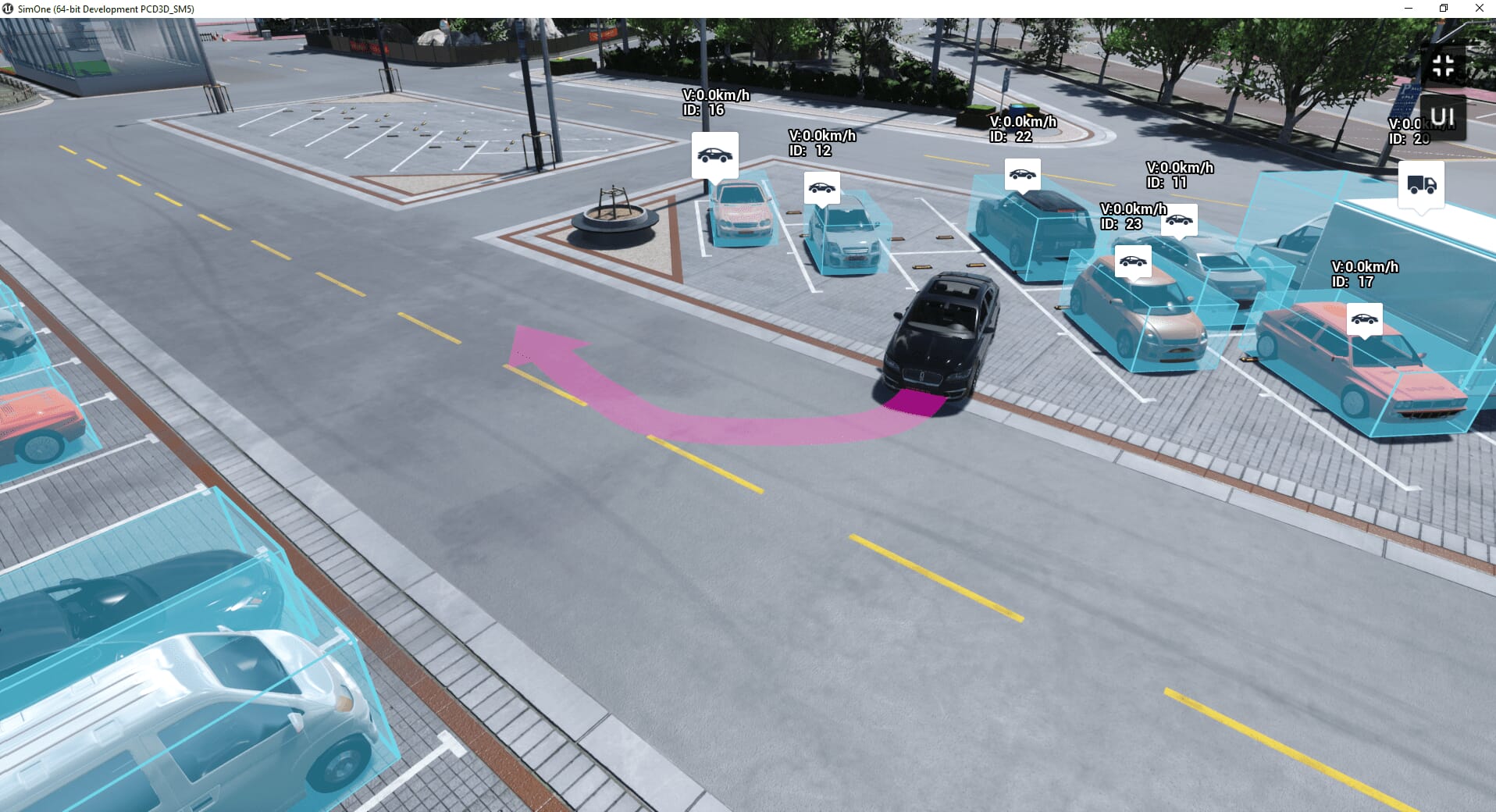
新增目标物可视化工具
在高精度可视化工具、简化可视化工具中集成目标物可视化模块用于目标对象的展示。
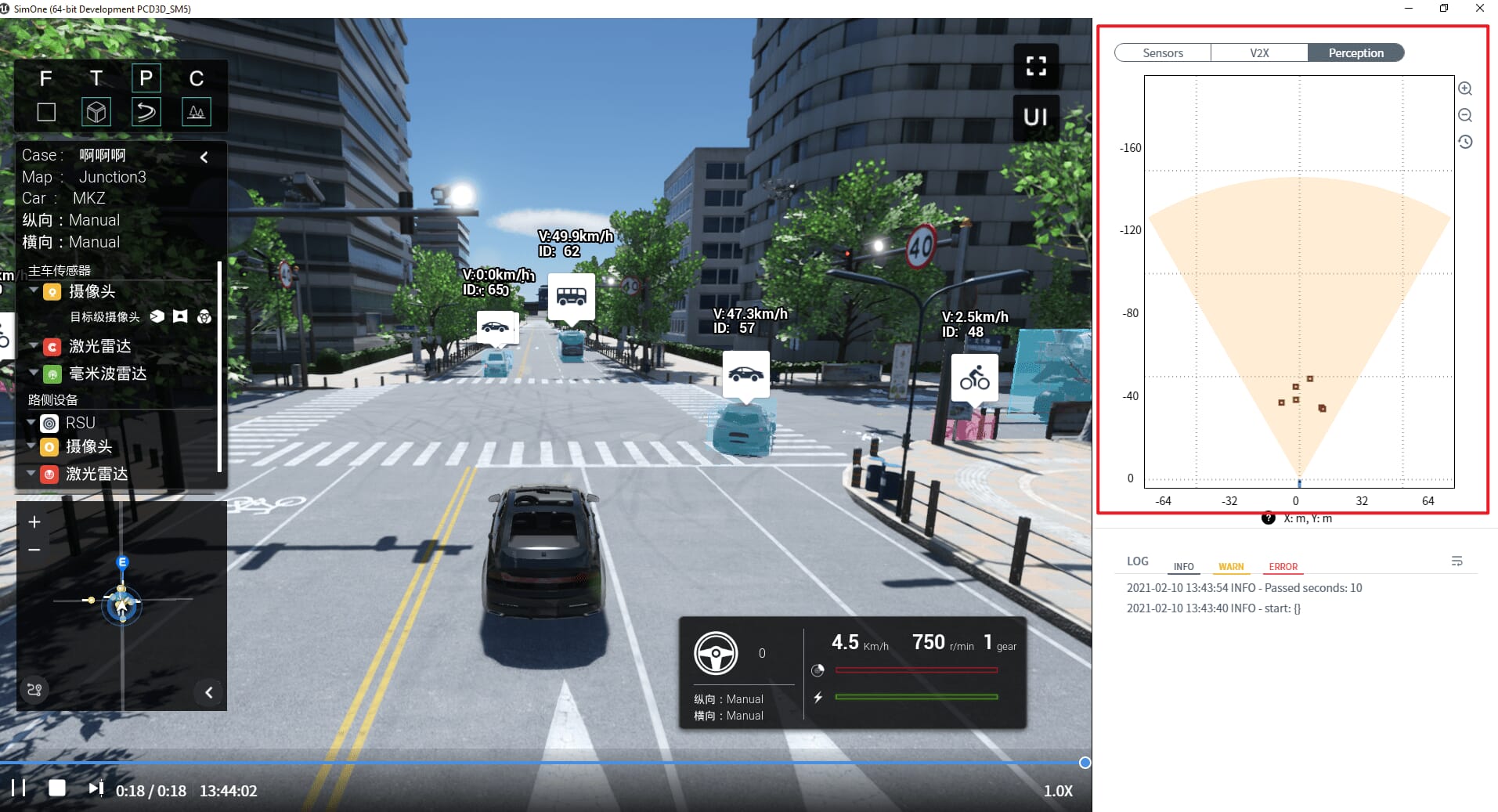
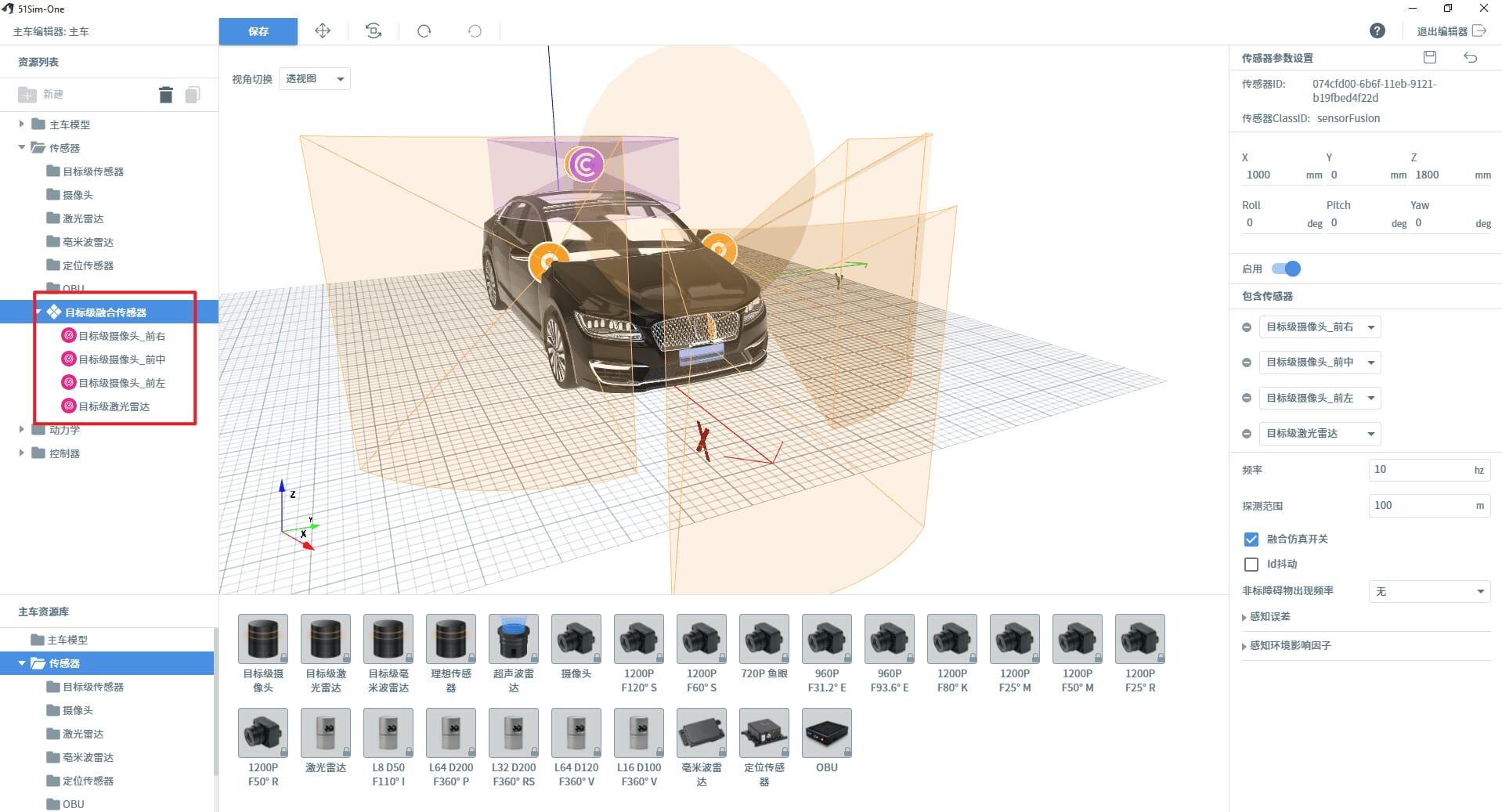
新增目标级传感器融合仿真
能够将多个目标物传感器的结果进行融合输出成一路目标物信号。
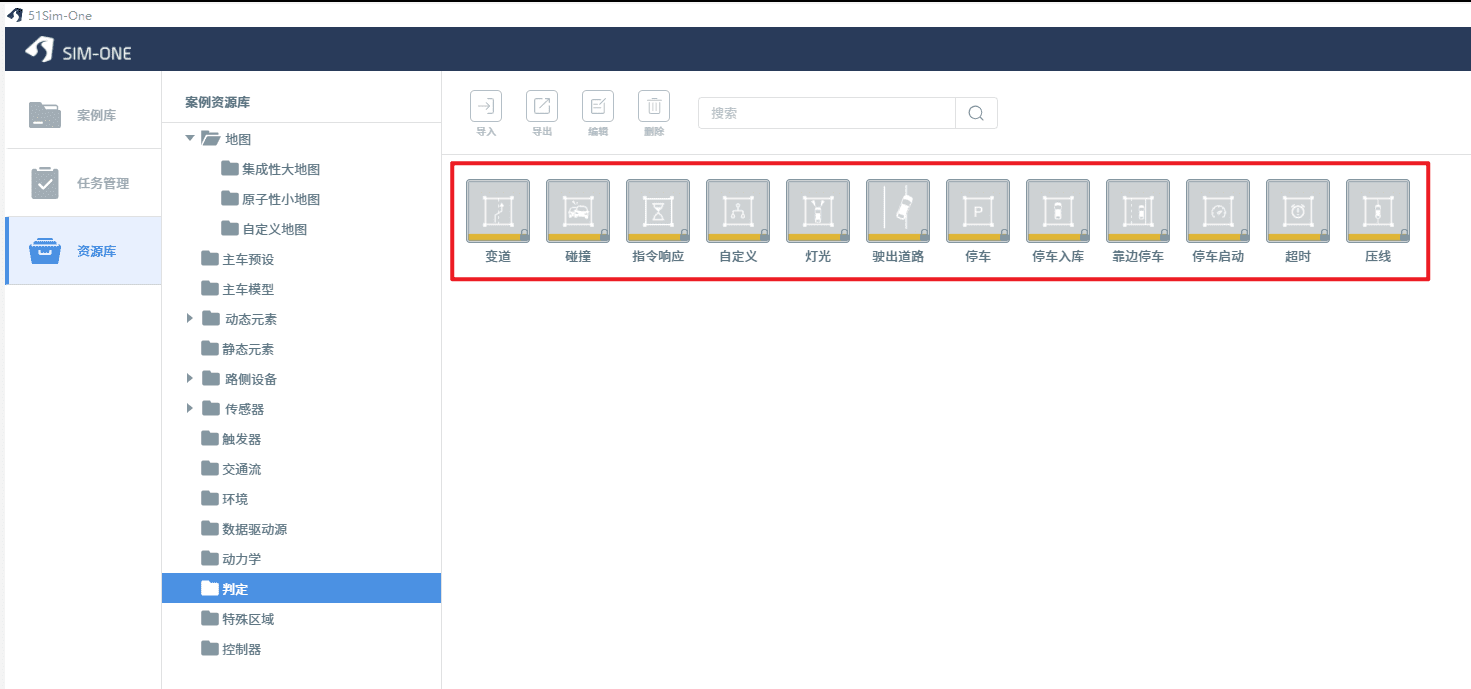
判定增强
增加4项判定条件: - 指令响应 - 灯光 - 驶出道路 - 停车入库
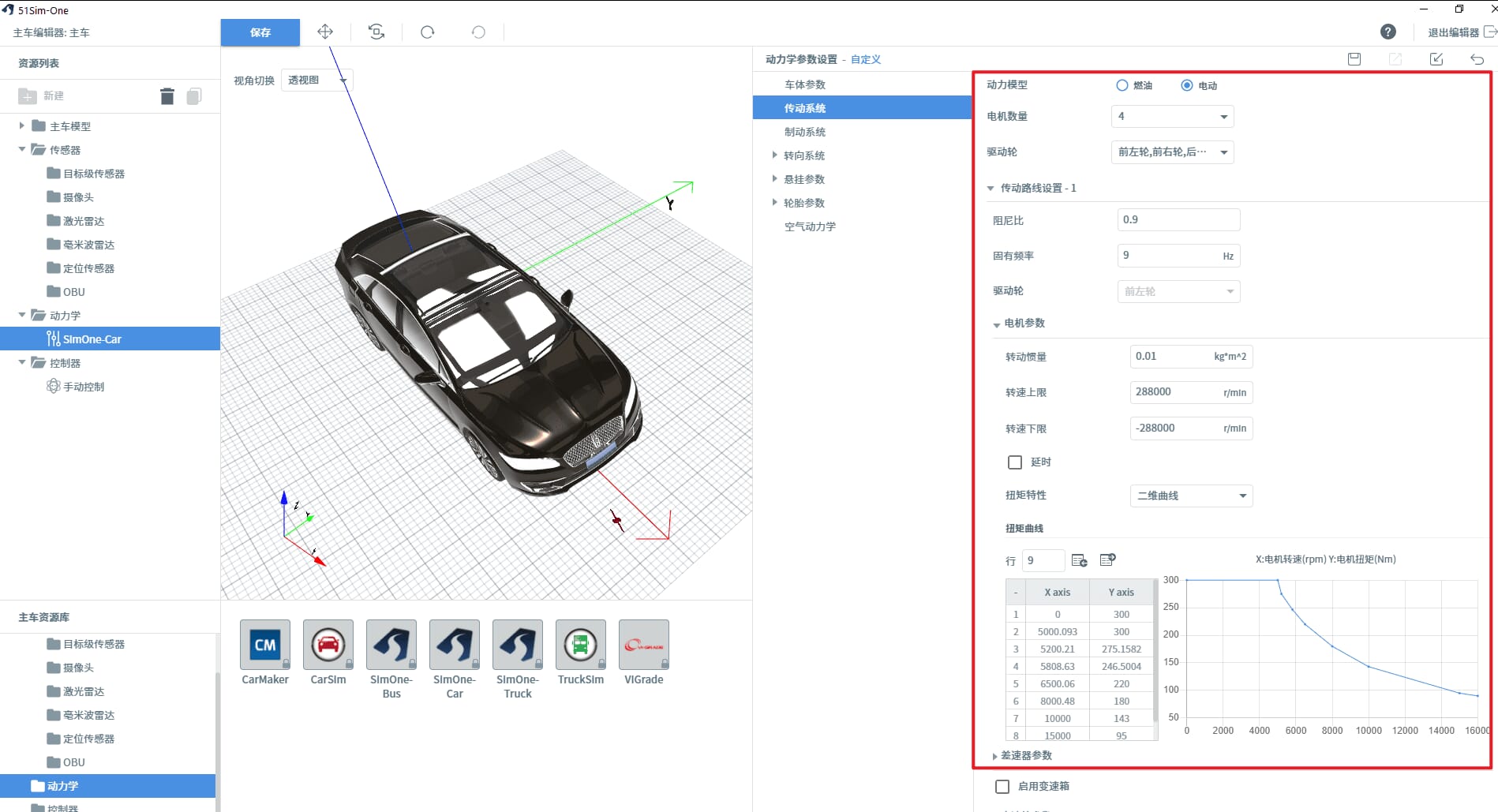
新增电动车动力学模型
增加电动车动力学模型,同时可满足carsim和carmaker动力学模型导入测试
Bug修复
-
修复数据驱动案例重采样失败的问题。
-
修复原子场景和高精地图不匹配的问题。
-
修复个别原子场景亮度过低的问题。
-
修复回放案例无法添加路侧设备的问题。
-
修复场景编辑器无法显示停车位的问题。
-
修复高质量可视化工具中行人包围盒闪烁的问题。
-
修复一键启动Simulink可能失败的问题。
-
修复测试报告字段显示不全的问题。
-
修复场景编辑器中地图偏移的问题。
-
修复部分静态元素在可视化工具中显示为对手车的问题。
常见问题
安装使用准备
安装SimOne前,你需要准备好加密狗,SimOne文件,vs2017(计算机需提前安装好)
安装过程
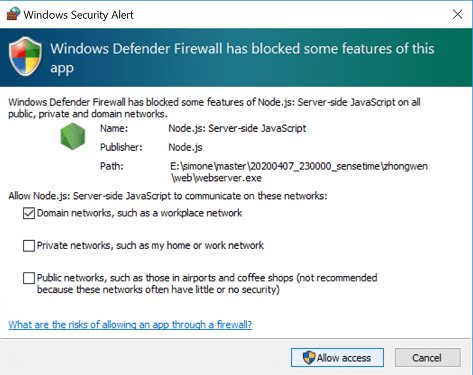
首先需要将加密狗先插电脑上,再安装驱动,插入狗会自动启动驱动程序,你只需点击下一步即可完成安装。接着打开文件夹release-devE运行setup(第一次安装用,以后都不需要),可能会显示你的配置不够,可以暂时忽略,输入Y安装成功即可。最后点开SimOneLauncher.exe,这个时候会跳出很多关于防火墙权限的页面,都点击允许即可。不需要改ip地址,默认为127.0.0.1应该没有什么问题。
软件包解压过程,报PAK错误
解决方法:此错误是因为系统性能差,偶发性错误,请检查硬件配置是否满足SimOne最低标准,或者当前系统是否有正在大量读写硬盘的操作,比如大文件复制等
启动SimOne Launcher,报CodeMeter许可证错误
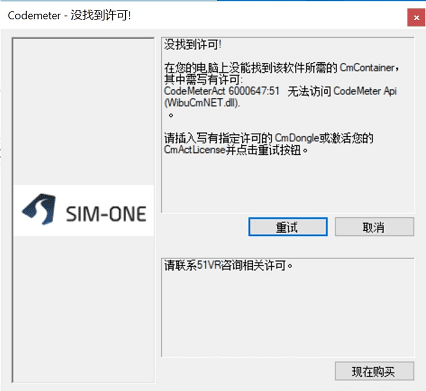
解决方法:此错误是因为 Codemeter运行时 未安装,Codemeter是SimOne选取的加密解决方案
请依照安装U盘目录,用户手册内(加密狗使用手册.pdf),安装正确的CodeMeter运行时程序(CodeMeterRuntime64.msi)
同时此手册也列举了在使用加密狗过程中可能遇到的其他问题,可供您参考。
双击SimOne Launcher,报非法字符错误
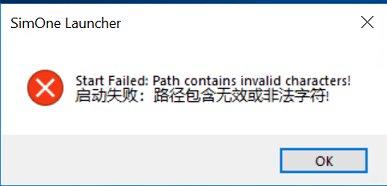
解决方法:此错误是因为 SimOne所在的目录包含空格或者中文等,请保证路径不含这些字符
解压软件后,运行好launcher,弹出SimOne管理界面后,直接运行默认案例,但是案例一直在待运行?
解决方法:由于内置案例会默认调用Apollo为控制系统的主车,所以在运行内置案例前必须先安装好Apollo并正确配置以及运行。如果没有安装Apollo,可以在运行内置案例的时候,选择运行方式为手动默认驾驶方式,这样可以正常运行案例,UE Observer运行窗口也会正常启动,用户需要通过键盘来控制主车运行。
双击start SimOne,页面反复重启或者一直转圈
解决方法:
1.检查路径是否偏长
2.检查nodejs是否安装,安装文件存在于release-dev/Extras,安装后需要重启
3.检查release-dev/Web/WebServer.exe是否存在,目前发现非7z解压,路径比较长的是否似乎会漏掉
双击start SimOne,Powershell窗口未弹出,软件无法启动
解决方法:此错误是因为用户机器安装了杀毒软件,会把SimOne守护进程误认为是病毒,需要退出所有杀毒软件,同时Windows防火墙弹出的窗口都点允许访问。
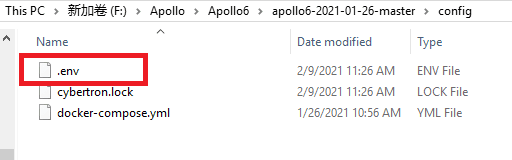
Apollo启动失败
解决方法:此错误原因可能较为复杂,常见原因为ENV设置不正确。请修改.env文件内SimOne程序所在机器的IP,端口等,再点击start.bat 文件。
UE Observer窗口能够正常启动,但是画面一片空白

解决方法:Config配置文件中多了些空格,需要修改配置文件,如果出现这种情况,请联系技术支持修改。
运行案例后UE Observer无法启动
解决方法:
-
如果您运行的是手动运行案例,请检查是否安装UE依赖的第三方库,可以在extra目录下找到UE4PrereqSetup_x64.exe。
-
如果您使用Apollo驾驶的方式运行案例,请检查是否安装配置好Apollo包,是否按照用户手册要求在config里正确配置了IP地址。
Ubuntu版本无法运行案例
解决方法:请先检查电脑主机配置,显卡是否符合要求。
如何接入用户自己的算法
解决方法:举例如下,如果我们用ros topic, 我们有如下Sample演示代码,提取传感器数据然后发到ros topic。 SimOne API提取传感器数据,例如点云,障碍物,相机,超声波等。然后发送到ros topic, 然后您这边的算法从rostopic 接受传感器数据,算法进行融合处理这些数据后再计算出来主车的油门,方向盘,刹车信息,调用SimOne API driver API 来控制主车。在产品更目录有一个sdk目录。然后网站启动后,有一个文档服务器,里面可以查阅各种api和范例代码。
平台文档无法打开
解决方法:没有安装node导致无法执行StartWebServer.bat的相关命令;安装nodejs
运行sample无法打开ue,一直等待测试
解决方法:打开config,勾选cpu_node2,然后重启SimOne即可
Setup.bat运行闪退
解决方法:
-
查看自己jdk是否安装并配置好环境变量
-
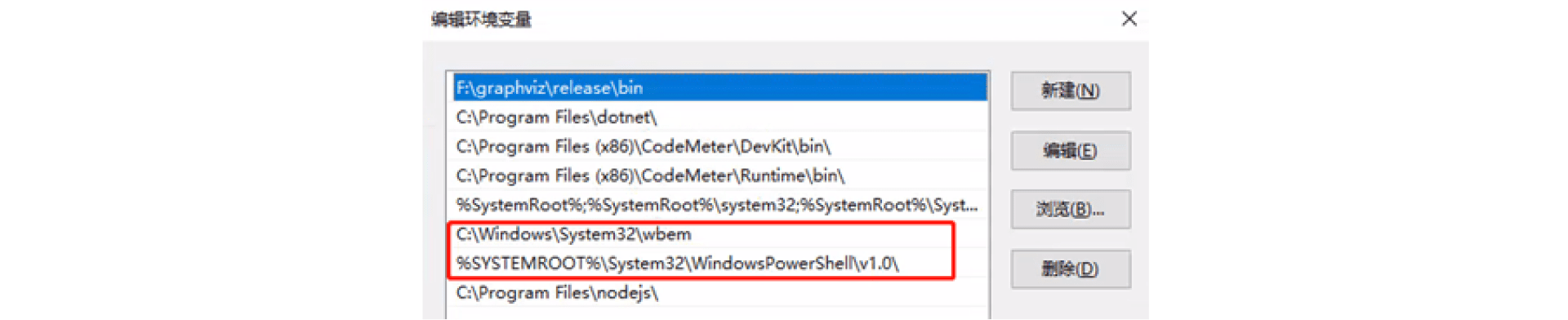
机器上无论什么bat都无法运行,先检查C:/WINDOWS/system32/wbem是否存在然后看看path是否有这个路径;
-
另外有些bat执行需要管理员权限
启动Launcher,WebServer无法启动
web下显示powershell不是内部或外部命令,也不是可运行的程序
解决方法:添加powershell的环境变量—–%SYSTEMROOT%/System32/WindowsPowerShell/v1.0/

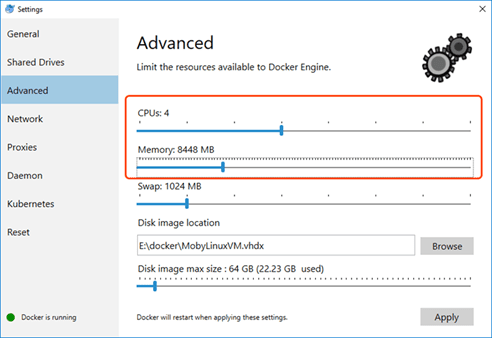
内置案例可以运行,但是算法主车左右摇晃走S形
解决方法:此问题是因为算法docker对系统分配的CPU和Memory有一定要求所致,如果低配不满足,算法会产生延迟等不可控因素,解决方案:请分配给Apollo有4核cpu和8GB内存至少,另外单机版本,主车不建议添加多于一个传感器。
在未能成功运行任务A时(任务A遗留于正在测试列表),用户新建任务B,此时任务列表堆积若干测试任务,但却无法继续测试
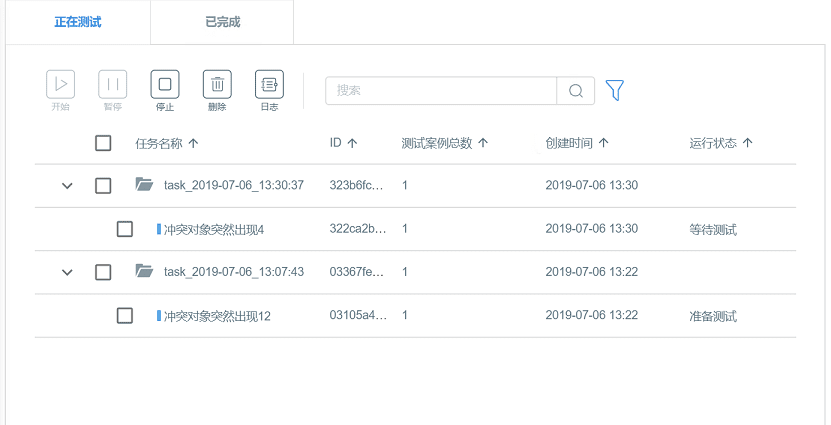
此错误是因为SimOne对多任务批量运行时,如果上一次任务设置不恰当会处于等待状态。
解决方法:手动停止或删除问题任务,后续任务将继续运行。

一键启动simulink开发环境相关
-
若电脑上安装有多个不同版本的Matlab,则2019a及以上的版本有更高的优先级;若多个版本同属于2019a以下或同属于2019a以上,则环境变量Path中先出现的那个有更高的优先级。
-
若出现“一键启动simulink开发环境失败,错误类型:app.api.error.code.30000X”,则根据错误码可尝试以下操作:
-
300001、300002 检查注册表中Matlab的路径是否存在和正确
-
300003 检查[期望使用的Matlab版本的安装路径]/bin/win64下libeng.dll文件是否存在
-
300004 以下两种办法可二选一: a:用管理员权限打开期望使用的Matlab版本,输入!matlab -regserver,并等待命令运行完成 b: 用管理员权限打开命令提示符,输入cd [期望使用的Matlab版本的安装路径]/bin/win64,输入matlab /regserver并运行
-
300005 请检查网络环境
-