v1.3 版本
发布时间:2020-11-03
新增功能
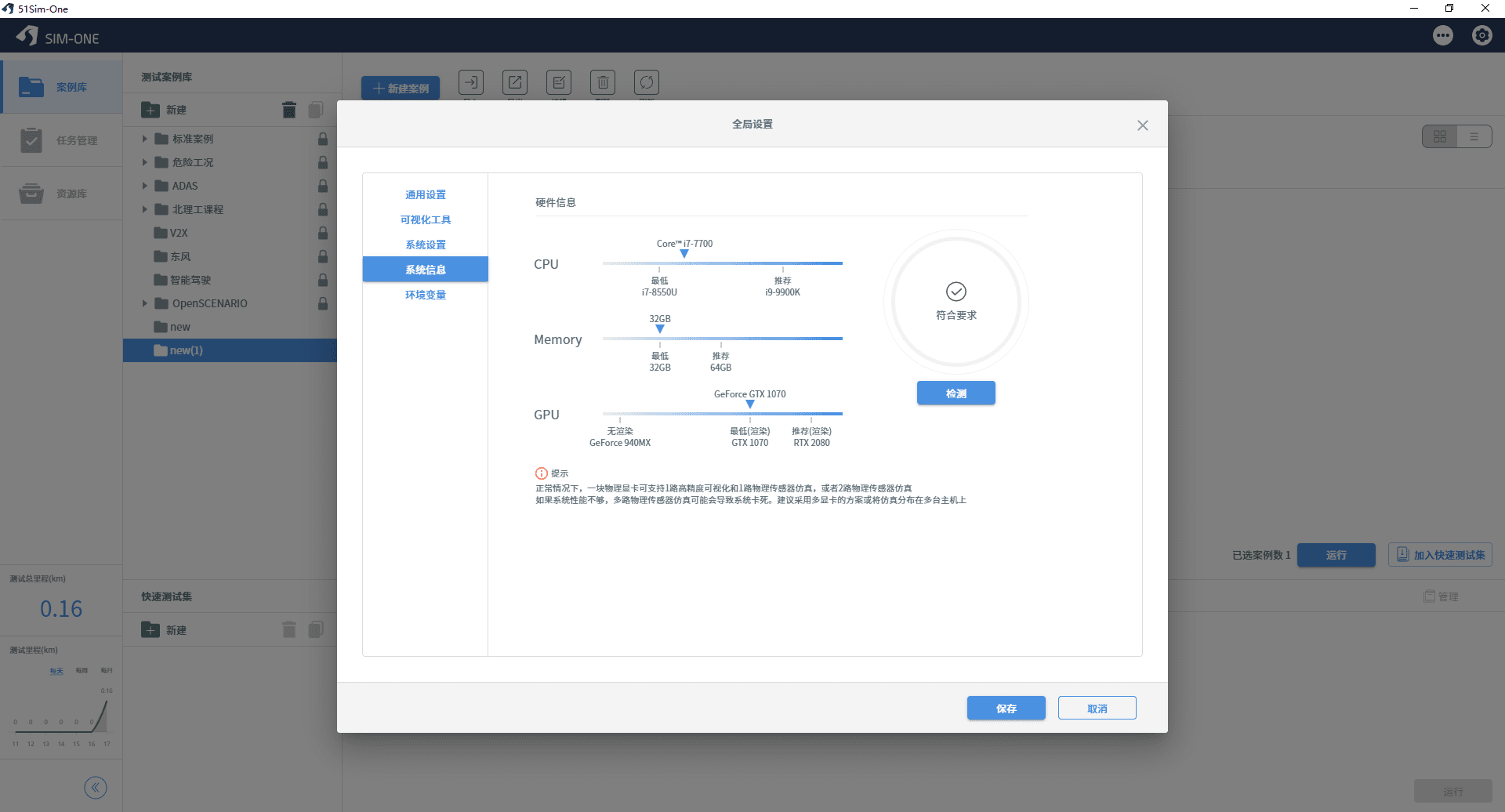
系统配置
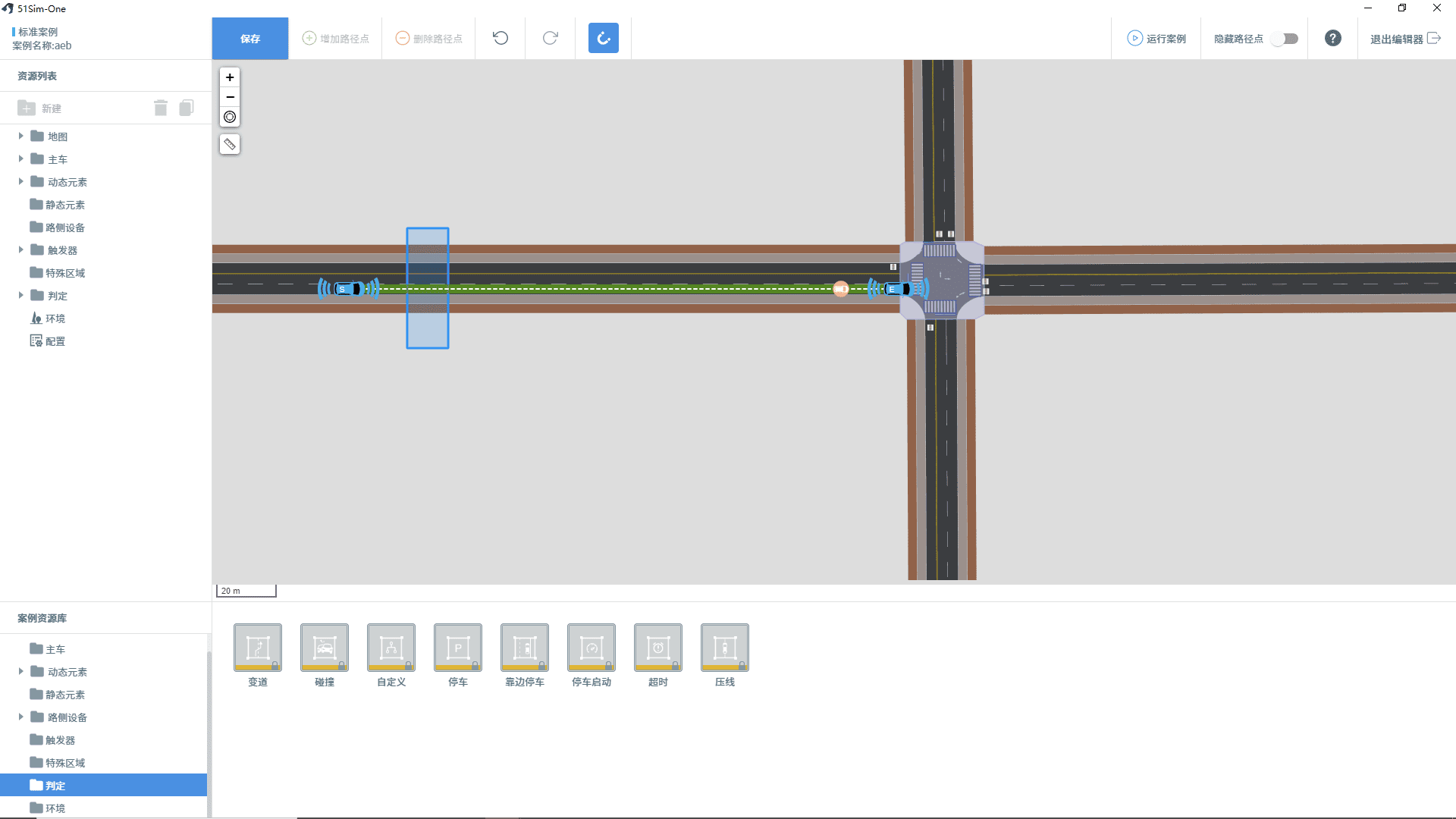
新增判定项目
新增了变道、靠边停车、停车启动、离车道线距离、偏离车道中心线等项目
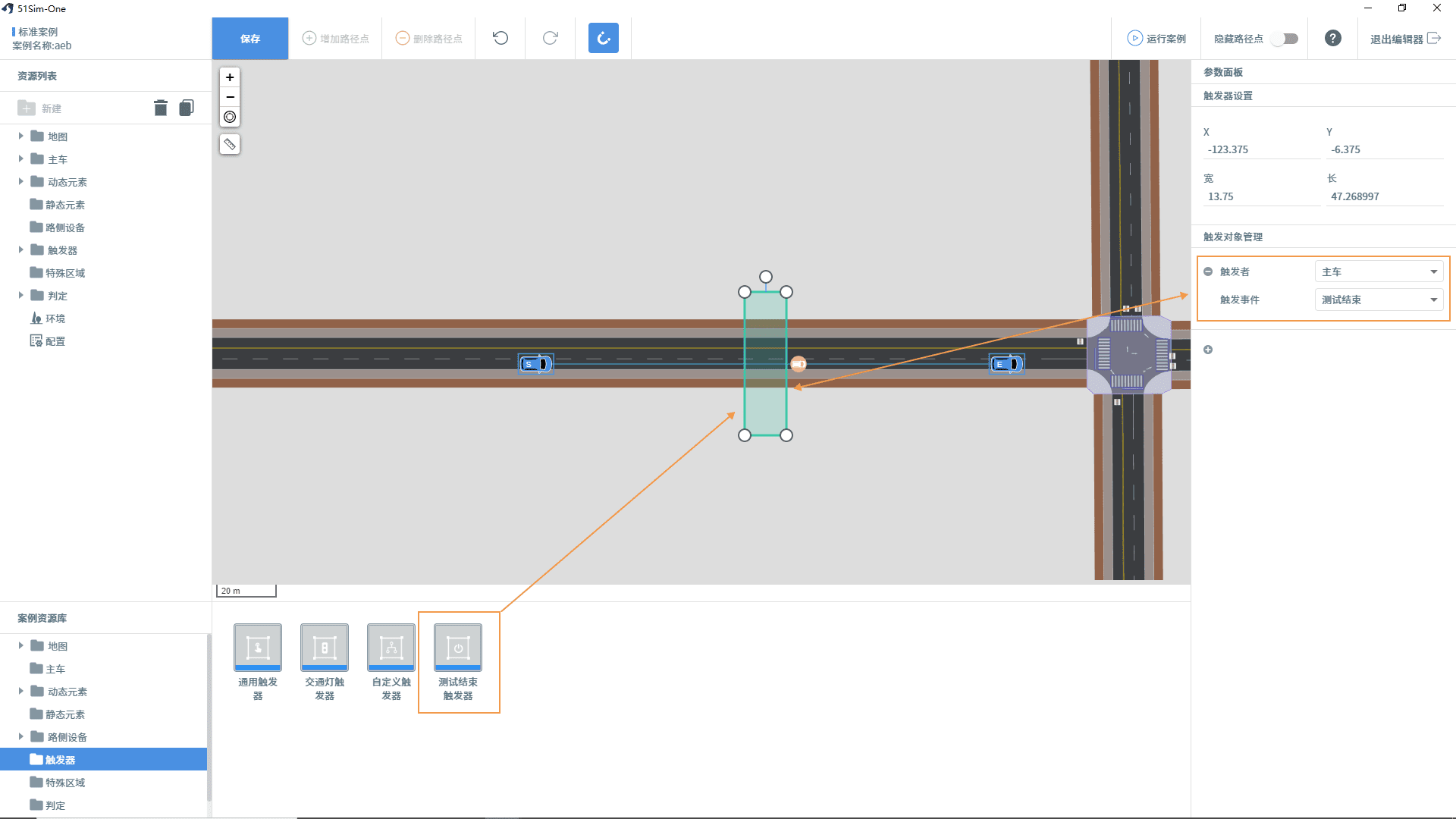
新增结束测试触发器
用户可在案例编辑器添加结束测试的触发器,当主车或其他对象达到触发条件时,系统会结束测试,若未添加该触发器,则系统默认以主车到达E点为结束条件
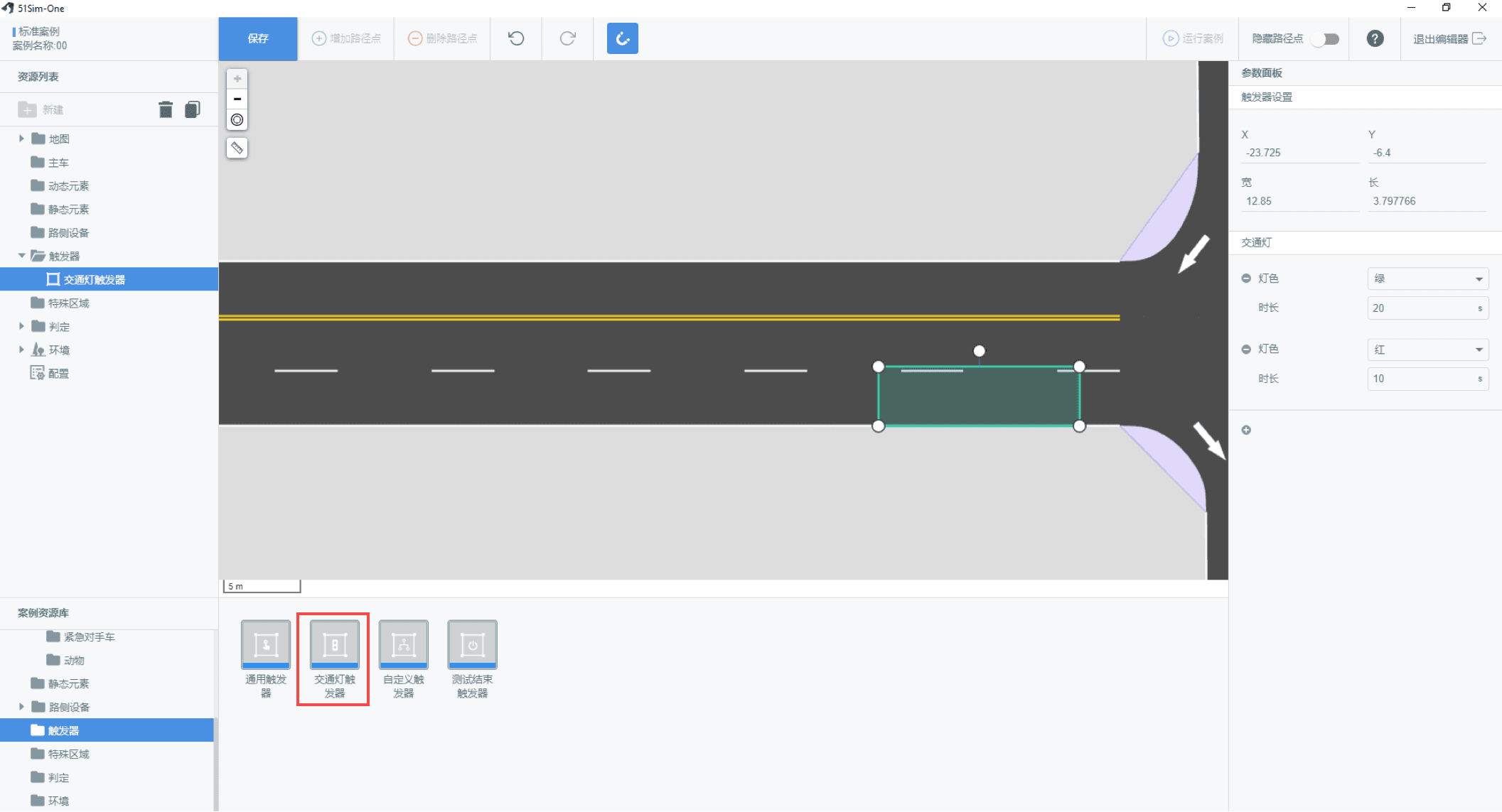
新增交通灯触发器
用户可在案例编辑器添加交通灯触发器,交通灯触发器,是用来控制路口交通灯行为的触发器,通过交通灯触发器即时介入改变指定道路对应信号灯的时序,触发结束后继续按原规则运转。
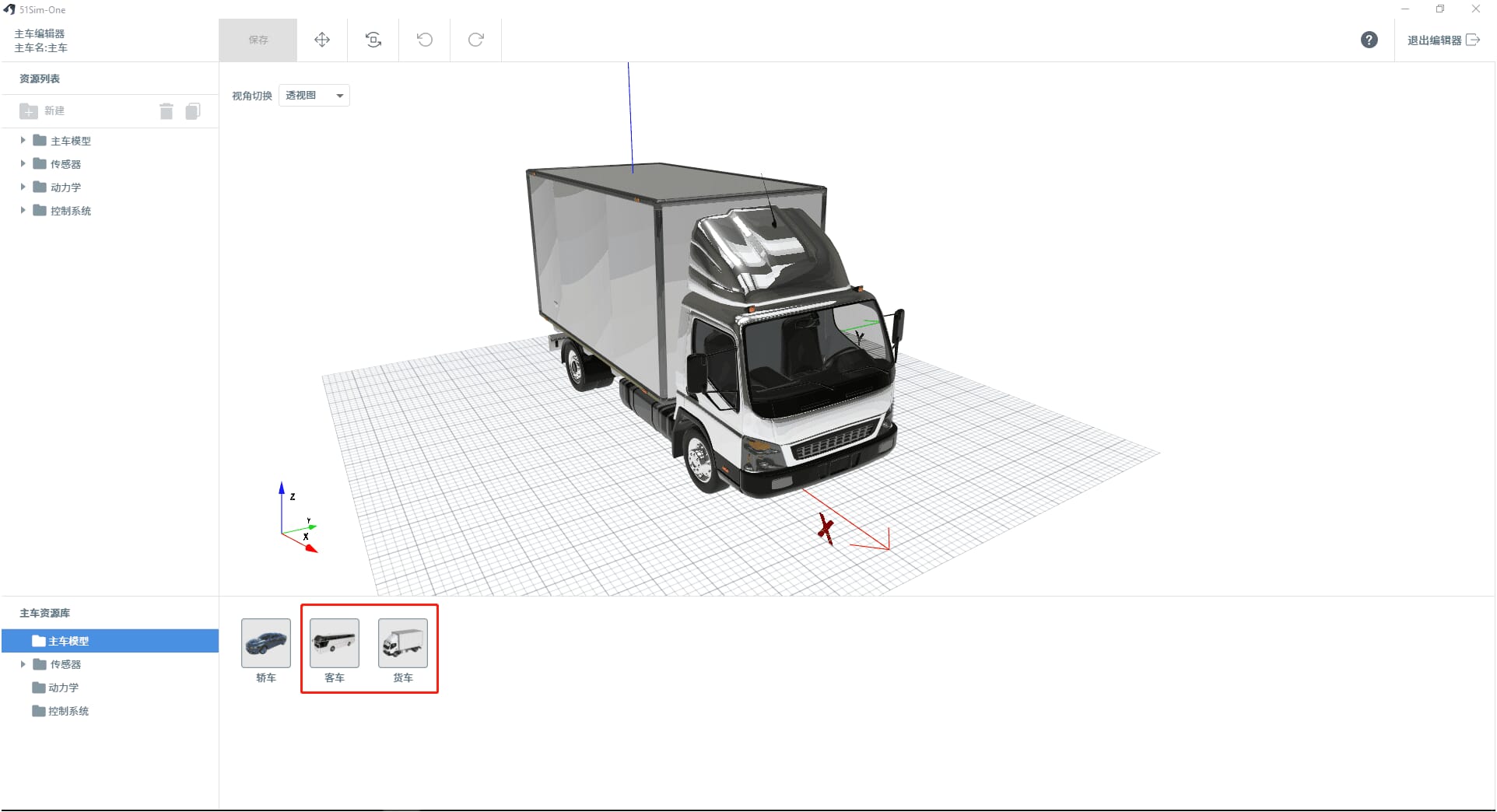
新增主车模型
全新增加2种类型的主车模型,包括货车以及大巴车。
新增内置资源
-
新增动态元素 – 行人:儿童、躺着的人;动物:狗;紧急对手车:警车、救护车;普通对手车:气球车;两轮车:摩托车。
-
新增静态元素 – 台阶、土堆、碎石块、石头

目标级传感器
增加多个目标级达传感器,用于支持用户更好地调试决策算法。 - 新增目标级激光雷达 - 新增目标级摄像头 - 新增理想传感器

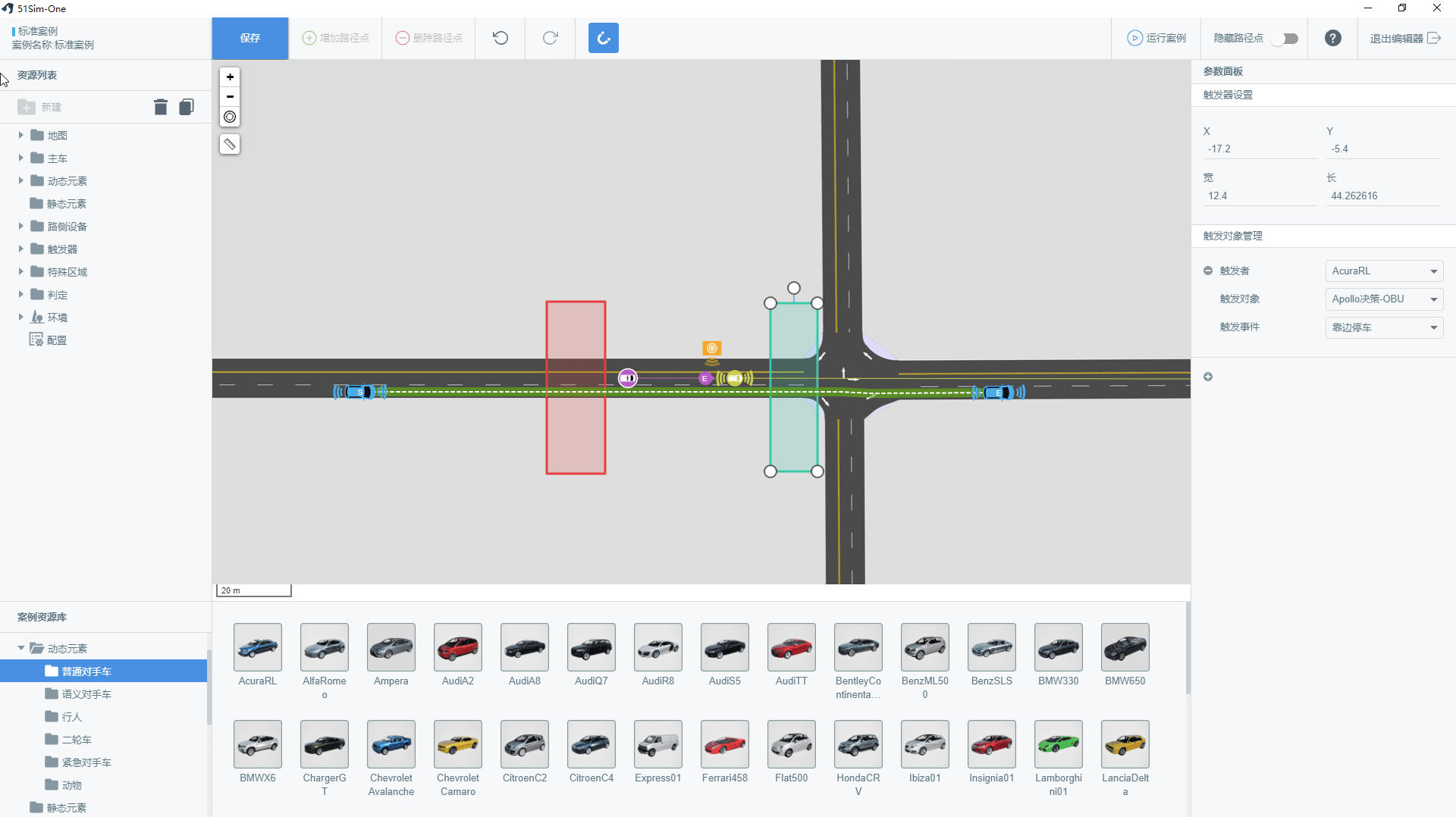
V2X传感器和案例的相关配置
-
主车传感器增加了OBU(车载单元)设备,用于支持V2X相关的案例。路侧设备中增加了RSU设备,用于支持V2X案例相关的测试场景。同时,对手车也可配置OBU,行人和非机动车也可配置是否支持V2X。
-
增加了自定义的触发者和触发器,方便用户构建V2X测试场景。
-
增加了紧急对手车,用于支持V2X测试场景。
-
增加了特殊区域,包括危险区域和拥堵区域,用于构建V2X测试场景。
Observer新增V2X消息及通信状态可视化
-
web/ue Observer均新增V2X消息可视化支持,包括行人、对手车、自行车、道路标志、拥堵、紧急车辆、交通灯等几类信息
-
OBU及RSU通信状态可视化展示

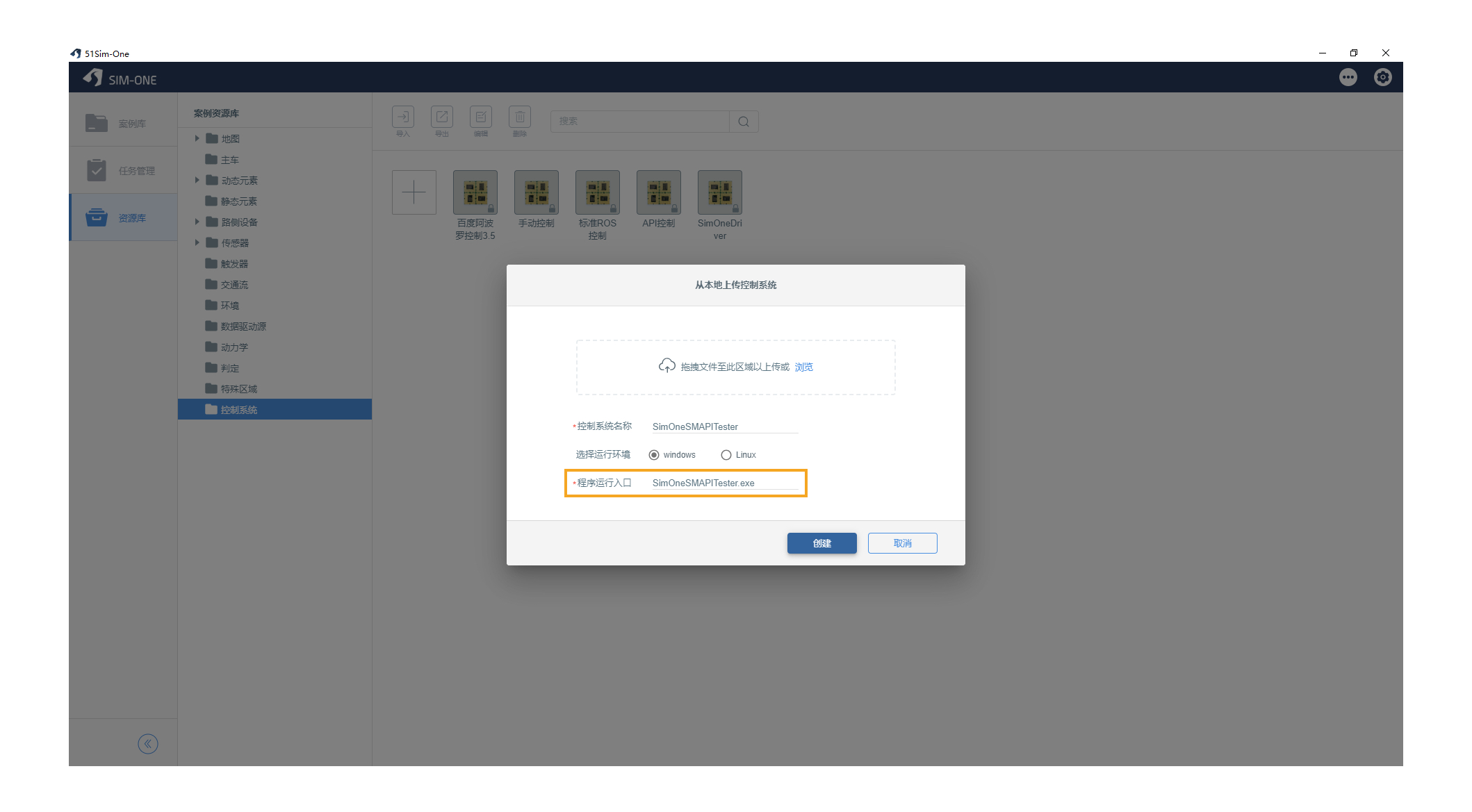
支持本地算法上传
用户可在资源库-控制系统文件夹上传打包成可执行程序的算法文件
一键启动simulink开发环境
用户可在主车编辑器,从主车控制系统中安装API控制后,在右侧属性面板点击“一键启动simulink开发环境”按钮,SimOne将启动matlab,并配置好开发环境,用户可在此文件编写调试算法
