v3.7.0 版本
发布时间:2025-10-15
新增功能
-
任务创建流程全面升级,实现主车、用例与算法解耦 :主车配置不再绑定算法,用例通过抽象控制器独立定义行为,任务创建支持主车、算法、版本灵活组合,显著提升用例复用率与测试覆盖度,助力跨项目快速验证与高效交付。
-
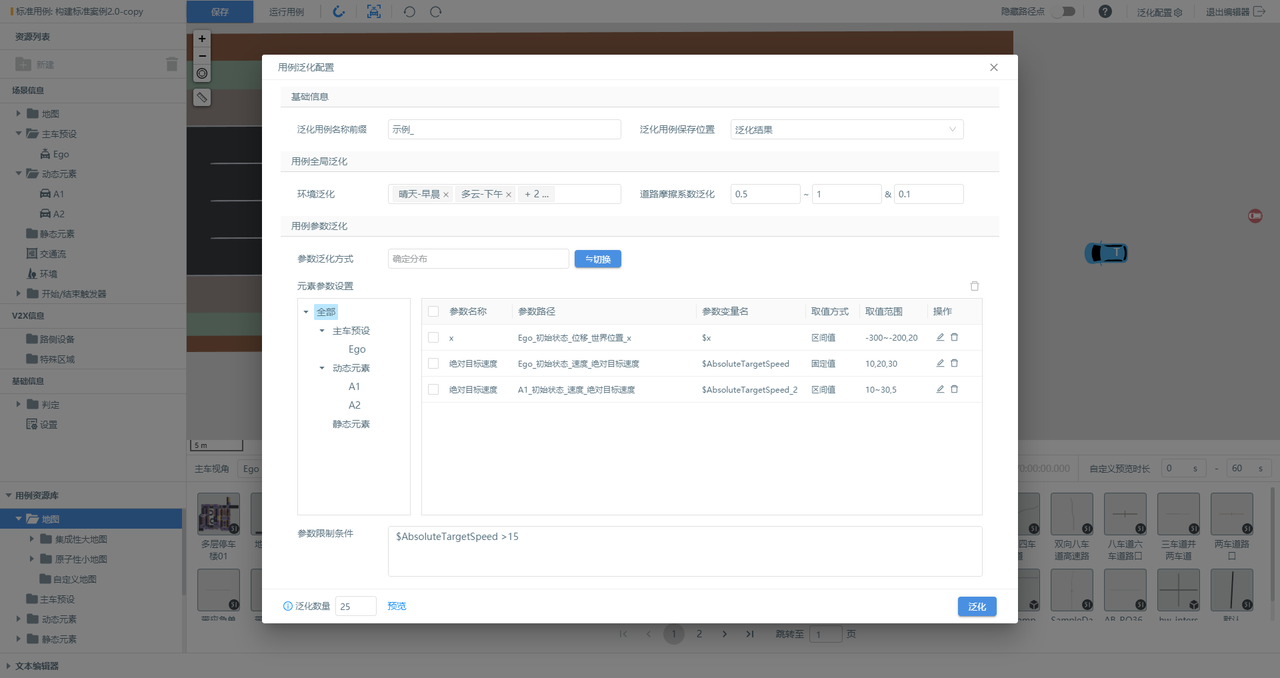
场景泛化 :支持界面化选择与配置泛化方式和参数,结合环境与道路摩擦系数等多维组合,系统性扩展 ODD 编辑范围,提升自动驾驶算法的测试覆盖度与泛化鲁棒性。
-
混合动力 :支持混动行星齿轮模式和并联模式,混动模式下可分配多个电机输出到轮端。
-
第三方动力学接口 :支持车轴、轮胎、悬架等参数配置,并通过通信接口传入车辆姿态、轮胎位置,返回接地点位置与法向量,实现更灵活精准的对接。
-
超声波雷达 :支持多个超声波雷达之间形成交叉回波。
-
用户自定义触发指令 :新增 UserDefinedValueCondition 条件类型,支持外部值比较与交互,实现 OpenSCENARIO 未覆盖的复杂或自定义条件判断,扩展场景逻辑灵活性。
-
算法输出数据存储 :新增运行中算法输出数据的存储与管理,支持结果查看与下载,便于后续分析与性能评估。
-
自定义评价框架 :支持以 Python 脚本开发自定义评价算子,可融入内置评价体系进行打分融合,也可独立生成自定义评价报告。
-
任务集结果对比 :在测试计划管理中,新增图表化分析功能,支持不同算法版本结果对比,帮助测试与研发团队高效识别迭代过程中的结果差异,加速问题定位与算法验证。

-
3DGS场景资源扩展 :新增3DGS停车场场景,更新3DGS十字路口场景效果。
-
CICD 自动化集成测试 (协作版):支持云端 Docker 镜像算法接入,结合测试计划与 Restful API 无缝对接 Jenkins,实现算法版本持续迭代与自动化验证,加速更新与部署效率。

改进修复
-
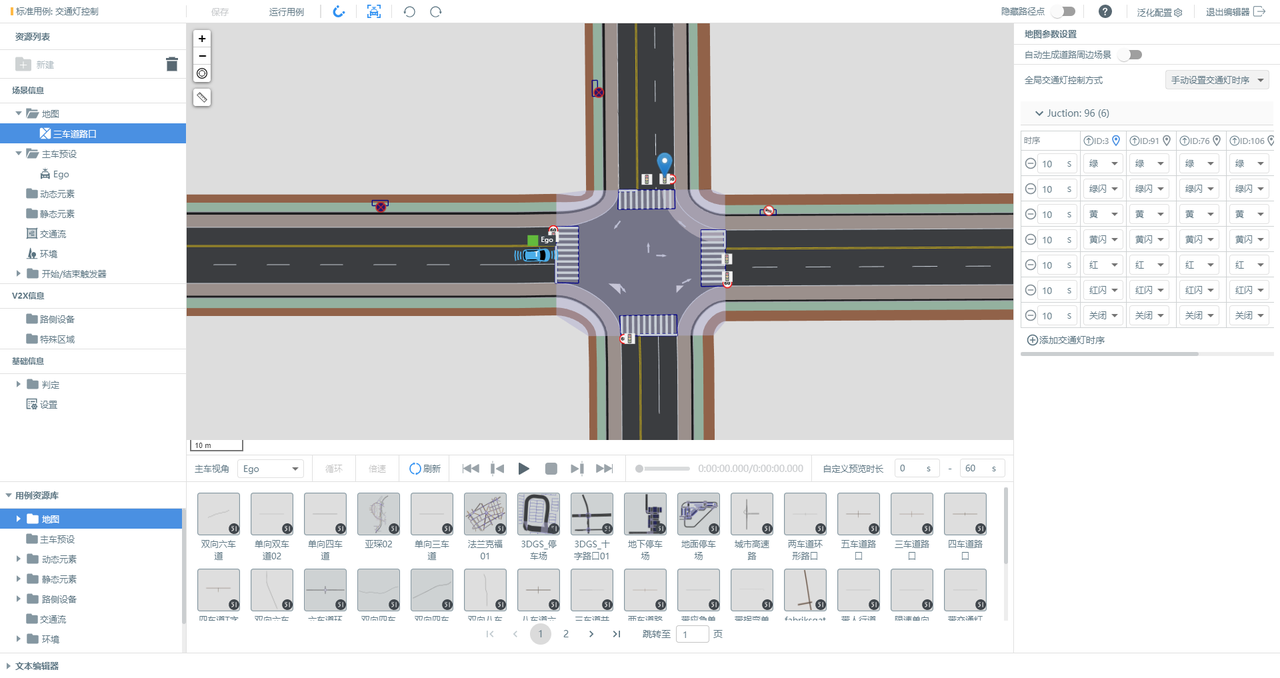
交通灯控制 :优化交通灯控制方式,支持自动生成时序、默认常绿、默认熄灭及手动设置4种控制方式,并可统一配置全局状态与时序,帮助用户模拟真实路况下的交通灯变化及异常场景,提升测试覆盖率与场景还原能力。
-
传感器性能优化 :4K畸变相机和鱼眼相机仿真帧率提升,API输出支持30+ fps稳定输出。
-
动力学性能优化 :加速度控制模式跟随效果提升,Simulink模块性能优化,支持四轮转向。
-
算法回传数据存储 :优化回传数据管理,支持回放中查看算法预测轨迹,提升任务回放展示一致性并助力问题定位分析。
-
磁盘空间预警 :支持自定义阈值监控磁盘状态,因磁盘空间不足导致的用例回放文件存储失败、应用崩溃等问题,提升磁盘管理的可靠性。
-
任务支持多人独立回放 (协作版-云端) :优化云端任务回放功能,支持任务独立回放不占用测试并发节点,允许多人同时发起回放操作,提升资源利用率与协同验证效率。
-
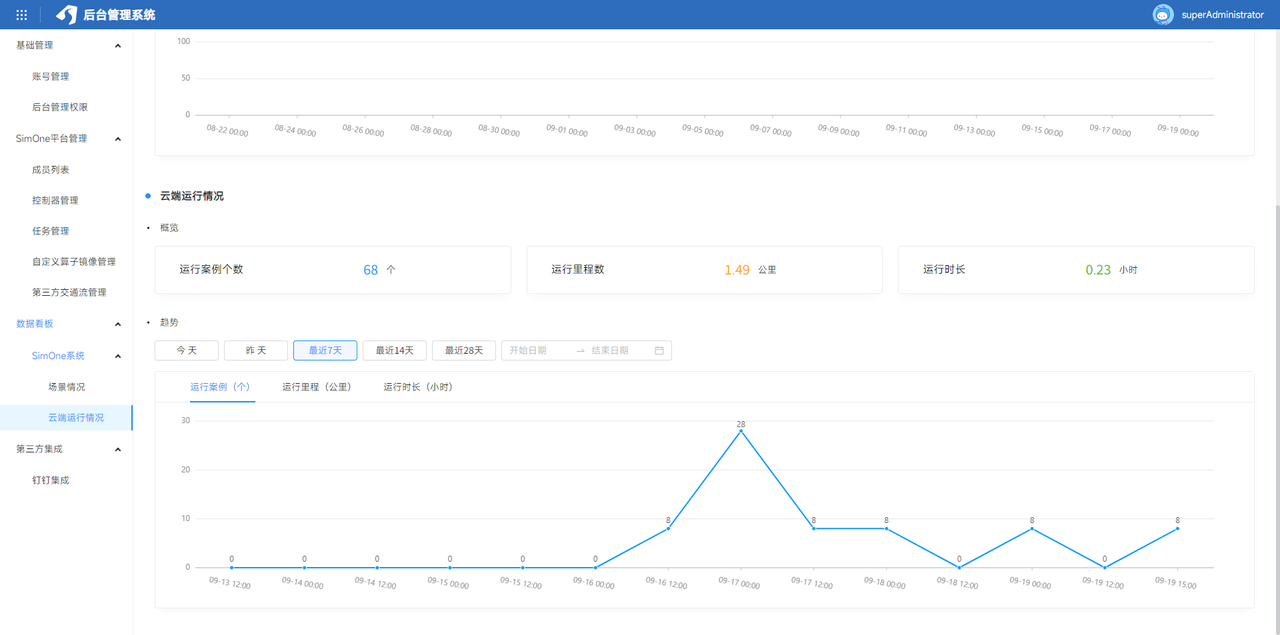
后台管理系统 (协作版-云端):面向协作版优化后台,新增部门管理与角色权限配置,并统一管理控制器、自定义算子镜像、第三方交通流镜像、数据看板及钉钉通知等系统级资源,实现高效集中管控。
-
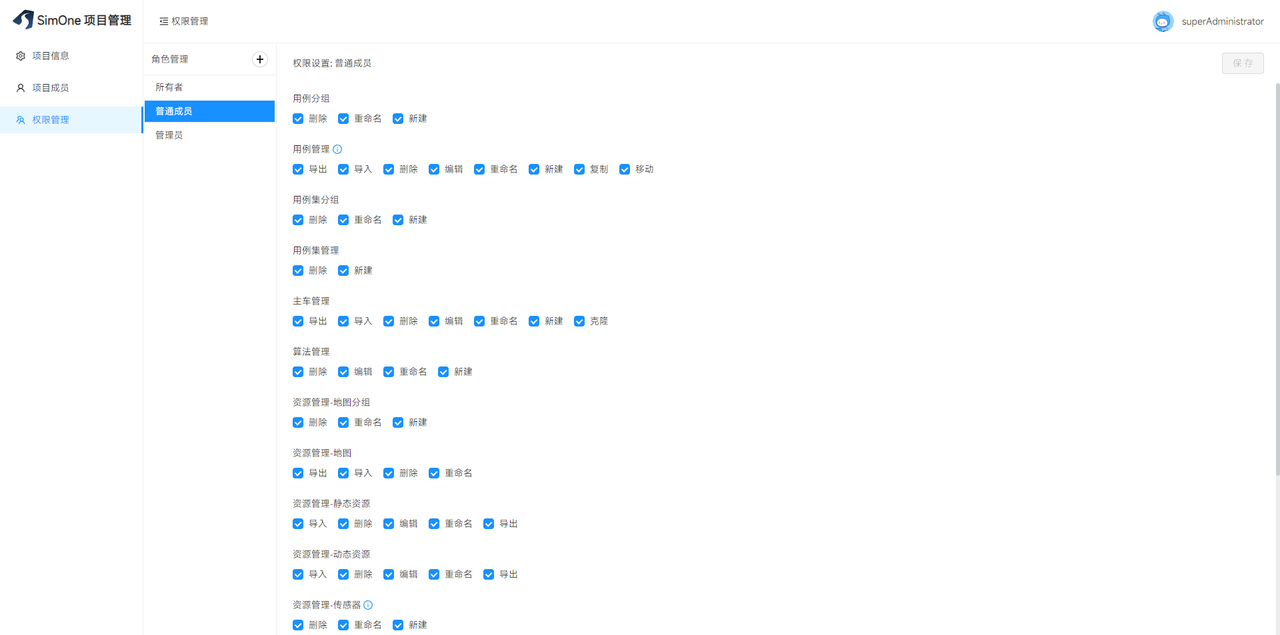
新增项目设置 (协作版):支持项目内用户数据共享与跨项目隔离,并可配置成员及角色权限(当前版本仅支持默认项目,后续将扩展多项目管理)。
-
问题修复 :SimOne API 更新及若干已知问题修复。